
Extras din laborator
În această lucrare se dezvoltă diferite modele de simulare a sarcinii mecanice aplicată la arborele unei maşini electrice. Aceste sarcini pot avea caracter reactiv (pasiv), sau activ (potenţial). Pe baza modelului obţinut se cor ridica prin intermediul simulării pe calculator caracteristicile mecanice ale sarcinii. Se cor ridica caracterisiticile pentru sarcină constantă, respectiv pentru sarcină variabilă în funcţie de turaţie (profil de variaţie liniară, pătratică şi cubică). În final, se va prezenta cazul variaţiei sarcinii în funcţie de drumul parcurs, exemplificat printr-o acţionare de 4 cadrane, şi anume electrocarul cu deplasare pe pantă la urcare, la coborâre şi la mers pe orizontală, cu faţa, respectiv cu spatele, care acoperă cele 4 cadrane de funcţionare în 6 regimuri de mers.
4.2. Consideraţii teoretice
Într-un sistem de acţionare electrică, pe axul motorului este aplicată o sarcină mecanică, care generează un cuplu rezistent pe arborele motorului. Acest cuplu poate avea caracter reactiv (pasiv) (mLR), respectiv caracter activ (potenţial) (mLA). Cuplurile rezistente reactive îşi schimbă sensul în funcţie de direcţia de mers, şi întotdeauna se opune acestuia, un exemplu fiind cuplurile datorate frecărilor. Cele active ce nu depinde de direcţia de mişcare, acţionând întotdeauna în acelaşi sens, exemplu fiind cuplurile generate de forţa gravitaţională.
4.3. Structuri de simulare
Modelarea sarcinii pasive
Se prezintă în continuare 4 modele ale sarcinii pasive, una constantă, independentă de turaţia n, iar celelalte trei prezintă dependenţă liniară, parabolică şi cubică faţă de turaţie.
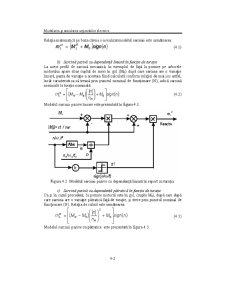
a) Sarcină pasivă constantă
Modelul sarcinii pasive este prezentată în figura 4.1.
Figura 4.1. Modelul sarcinii pasive constante.
4-1
Modelarea şi simularea acţionărilor electrice
Relaţia matematică pe baza căreia s-a realizat modelul sarcinii este următoarea:
()()nsignMMmRLctL0.+= (4.1)
b) Sarcină pasivă cu dependenţă liniară în funcţie de turaţie
La acest profil de sarcină mecanică, în exemplul de faţă la pornire pe arborele motorului apare doar cuplul de mers în gol (M0) după care sarcina are o variaţie liniară, panta de variaţie a acestuia fiind calculată conform relaţiei de mai jos astfel, încât caracteristica să treacă prin
Preview document







Conținut arhivă zip
- Sarcinile Mecanice ale Motoarelor Electrice de Actionare.pdf
Alții au mai descărcat și

Cunoasterea duratei de timp de la semanat pâna la rasaritul plantelor mai are însemnatate si pentru obtinerea unor productii cat mai timpurii. Daca...

In multe aplicatii este nevoie de un element care sa prezinte 2 stari diferite, cu posibilitatea de a trece dintr-o stare in cealalta, fara sau in...

5.1. Introducere În acest capitol se prezintă modelul matematic al motorului de curent continu (c.c.) în regim stabilizat care serveşte la...

Cerintele sistemului operational Odata ce a fost definita nevoia si abordarea tehnica, e necesar sa le tranlatam intr-un “scenariu...

Intersectiile caracteristicii cu axele de coordinate definesc 2 puncte semnificative in functionarea motoarelor elementare. Intersectia cu axa...
Te-ar putea interesa și

Memoriu de prezentare Activitatea umană s-a orientat întotdeauna spre realizarea unei vieţi mai bune, spre eliberarea parţială sau totală de...

1. GENERALITĂŢI. MAŞINA DE CURENT CONTINUU. 1.1. Definiţii. Maşina de curent continuu este un sistem de conversie electromecanică a energiei...

CAPITOLUL 1 PREZENTAREA GENERALA A INTREPRINDERII 1.1 Scurt istoric Documentele de arhiva atesta ca inceputul construirii societatii comerciale...

Cap. I ALEGEREA PARAMETRILOR NOMINALI Parametrii nominali ai instalatiilor de ridicat, sarcina, vitezele, inaltimile de ridicare, deschiderile...

1.Tema de proiectare Sa se proiecteze sistemul de actionare electrica pentru mecanismul de ridicare al unui pod rulant actionat de o masina...

1. Generalităţi Problema alegerii motorului electric apare fie în cadrul proiectului unui obiectiv nou, fie în cadrul modernizării unui obiectiv...

Circuite electrice de curent continuu Întrebarea 1. Circuit electric şi elementele lui Prin circuite electrice de curent continuu înţelegem...

Tema Proiectului Proiectarea unui sistem electrohidraulic de reglare a vitezei de rotatie folosind ca element de comanda a energiei o servovalva...