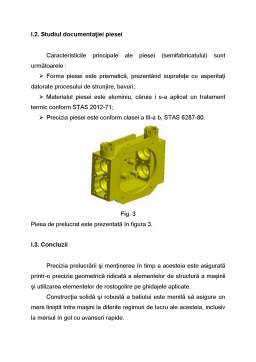
Extras din laborator
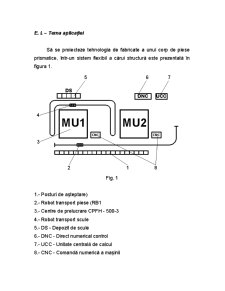
Să se proiecteze tehnologia de fabricate a unui corp de piese prismatice, într-un sistem flexibil a cărui structură este prezentată în figura 1.
Fig. 1
1.- Posturi de aşteptare)
2.- Robot transport piese (RB1
3.- Centre de prelucrare CPFH - 500-3
4.- Robot transport scule
5.- DS - Depozit de scule
6.- DNC - Direct numerical control
7.- UCC - Unitate centrală de calcul
8.- CNC - Comandă numerică a maşinii
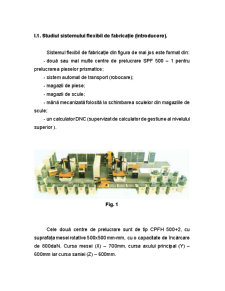
I.1. Studiul sistemului flexibil de fabricaţie (introducere).
Sistemul flexibil de fabricaţie din figura de mai jos este format din:
- două sau mai multe centre de prelucrare SPF 500 – 1 pentru prelucrarea pieselor prismatice;
- sistem automat de transport (robocare);
- magazii de piese;
- magazii de scule;
- mână mecanizată folosită la schimbarea sculelor din magaziile de scule;
- un calculator DNC (supervizat de calculator de gestiune al nivelului superior ).
Fig. 2
Cele două centre de prelucrare sunt de tip CPFH 500+2, cu suprafaţa mesei rotative 500x500 mm-mm, cu o capacitate de încărcare de 800daN. Cursa mesei (X) – 700mm, cursa axului principal (Y) – 600mm iar cursa saniei (Z) – 600mm.
Tipurile de avansuri:
- avans liniar de lucru(X,Y,Z) – 3-3600 mm/min
- avans liniar rapid 10000 mm/min
- avans liniar de poziţionare.
Sistemul flexibil de prelucrare pentru piesele prismatice CPFH 500+2 este destinat pieselor de dimensiuni mijlocii de configuraţii complexe, în producţie de serie mică sau unicate, şi se compune din :
- două centre de prelucrare CPFH 500-3, alcătuit din batiu pe care se deplasează sania;
- un robocar – asigură transportul şi schimbarea automată a paletelor port-piesă;
- 9 posturi de stocare a paletelor port-piesă care formează un magazin de palete;
- un post de încărcare-descărcare care este prevăzut cu un sistem de rotire, frână, indexare a paletei în scopul prinderii piesei;
- 5 magazii-modul de scule tip celulă dispuse în linie;
- un manipulator scule – asigură transportul sculelor între magaziile modul şi mecanismul de transfer şi invers;
- 2 maşini de transfer – realizează transferul sculelor;
- cameră de pregătire a sculelor;
- post de triaj piese;
- cameră dispecer;
- cameră întreţinere;
- un număr de posturi de stocare suplimentare;
- post control al pieselor prelucrate;
- post de spălare automată a pieselor prelucrate.
Preview document























Conținut arhivă zip
- Laborator PTSF.doc
Alții au mai descărcat și

INTRODUCERE SFF-ul reprezintă un ansamblu de maşini-unelte reunite într-un sistem comun de transport, manipulare şi depozitare a semifabricatelor,...

Au aparut ca o evolutie fireasca in sensul automatizarii proceselor de productie fiind masinile cele mai produse. Evolutia automatizarii a parcurs...

ETAPA a-I-a 1. Studiul desenului de executie Analizind desenul de executie al piesei propuse pentru realizare se constata urmatoarele : •...

Studiul echilibrarii motorului propus în tema de proiectare vizeaza urmatoarele obiective: - Finalizarea solutiei constructive a motorului ; -...



• Introducere relatii Miscarea oscilatorie armonica rectilinie. Definitie: Un punct material executa o miscare oscilatorie armonica rectilinie...
