
Cuprins
- 1. Descriere context și problemă.
- 2 . Configurare mediu de lucru (amplasament obiecte, efector terminal) (a&b).
- 3 . Definire I/O și evenimente (c).
- 4 . Puncte suport traiectorie (d).
- 5 . Traiectorii robot .
- 6 . Configurare componente active pentru generare obiecte în mod aleator.
- 7 . Calcul timp de ciclu.
Extras din proiect
1. Descriere context și problemă
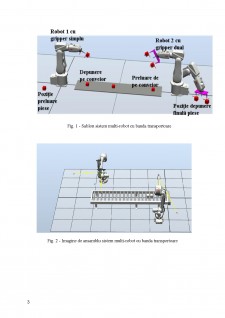
Proiectul are ca scop alcatuirea unui sistem multi-robot cu banda transportoare.Robotul 1 cu gripper simplu ( manipuleaza o singura piesa) ia o piesa dintr-un punct fix si o plaseaza pe conveior. Conveiorul transporta piesa pana in apropierea robotului 2. Robotul 2 preia piesele pe masura ce acestea ajung in dreptul sau incarcand secvential ambele grippere. In momentul in care ambele grippere sunt pline, piesele vor fi depuse in pozitia finala.
Realizarea în format digital a unui proiect de automatizare care implică un robot industrial presupune următoareale etape: a) realizarea modelului virtual, b) alegerea tipului de robot (sau de roboți dacă este un proiect multirobot) și a efectorului terminal astfel încât să poată fi deservite pozițiile necesare, în acest pas se stabilește și poziția robotului/roboților, c) descrierea intrărilor și ieșirilor necesare pentru interconectarea cu mediul (automat programabil) și cu dipozitivul manipulat (e.g.: gripper), d) descrierea punctelor suport pentru traiectoriile robotului, e) descrierea traiectoriilor, f) implementarea traiectoriei și a componentelor active care simulează mediul real, g) calculul timpului de ciclu (sau a timpului mediu de ciclu în cazul în care preluarea se realizează din poziții variabile - ex.: o cutie care se golește).
Fig. 1 - Sablon sistem multi-robot cu banda transportoare
Fig. 2 - Imagine de ansamblu sistem multi-robot cu banda transportoare
2. Configurare mediu de lucru (amplasament obiecte, efector terminal) (a&b)
Am ales 2 roboti de tipul IRB 4600:
Fig. 3 - robot de tipul IRB 4600
Fig. 4 Gripper simplu - robot 1
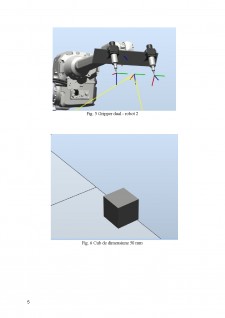
Fig. 5 Gripper dual - robot 2
Fig. 6 Cub de dimensiune 50 mm
Fig. 7 Banda transportoare (conveior)
Preview document











Conținut arhivă zip
- Sistem multi-robot cu banda transportoare.docx
Alții au mai descărcat și

3.1.Accesul mijloacelor si al personalului pentru interventie in caz de incendiu se asigura in permanenta la toate: a) constructia unitatii cu...

Masuratorile directe de aceeasi precizie, reprezinta un volum important de lucrari, executate pe teren în cadrul activitatilor geodezice,...

Te-ar putea interesa și

INTRODUCERE Lucrarea „ Proiectarea acţionărilor electropneumatice din componenţa unei staţii de sortare automată” are ca scop prezentarea...

TEMA PROIECTULUI Realizarea arborilor pentru maşini electrice. CARACTERIZAREA SISTEMULUI Sistemul este flexibil, liniar si complet automatizat....


Prin proces industrial se întelege un ansamblu de transformari mecanice, electrice sau de alta natura care au loc în instalatii industriale....

Capitolul 1 INTRODUCERE ÎN PROBLEMATICA SISTEMELOR DE CONDUCERE Robotul industrial reprezinta în momentul de fata punctul de intersectie al...

I. CARACTERISTICI Orice unitate de productie are ca obiectiv principal producerea de bunuri materiale si servicii care se realizeaza prin...