Cuprins
- Prezentarea problemei .. pag. 3
- Capitolul l .. pag. 4
- 1. Determinarea modelului matematic de stare al pendulului inversat .. pag. 4
- 2. Determinarea functiilor de transfer .. pag. 6
- Capitolul 2 Obtinerea unui controler cu reactie de la stare ce stabilizeaza sistemul .. pag. 7
- Capitolul 3 .. pag.15
- 1. Proiectarea unui regulator PI utilizând locul radacinilor .. pag.15
- 2. Proiectarea unui regulator PID utilizând locul radacinilor .. pag.17
- Capitolul 4 Proiectarea unui LQ optimal .. pag.19
- Capitolul 5 Proiectarea unui regulator în discret .. pag. 21
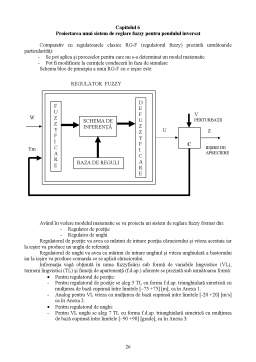
- Capitolul 6 Proiectarea unui sistem de reglare fuzzy pentru pendulul inversat .. pag.26
- Capitolul 7 Proiectarea unui estimator unitary .. pag.30
- Capitolul 8 Sinteza directa în domeniul timp a unui regulator numeric .. pag.33
Extras din proiect
Prezentarea problemei
Se da un pendul invers pe un carucior actionat de un motor de curent continuu cu turatia reglata pe indus. Acesta este un model al controlului comportarii unei platforme de lansare a rachetelor la decolare. Problema principala a controlului este mentinerea verticala a platformei de lansare. Pendulul invers este instabil în orice moment din orice directie, în afara de faptul când se aplica o forta de reglare corespunzatoare. Aceasta se aplica la caruciorul de masa M. Consideram doar problema bidimensionala, astfel încât pendulul se misca numai în planul foii.
Se cere:
1. Sa se determine modelele matematice de stare ale sistemului în cazurile:
- masa pendulului este concentrata la capatul bastonului ca în figura (consideram ca bastonul nu are masa)
- masa pendulului este concentrata la mijlocul bastonului ca în figura (consideram ca bastonul nu are masa)
2. Functiile de transfer si schemele bloc ale pendulului actionat de motor.
3. Analiza în domeniul timp a sistemului utilizând metode numerice. Analiza lui y(t) pentru intrarile: ,
4. Caracteristici de frecventa, margine de faza si margine de amplitudine.
5. Alegerea unor structuri clasice de reglare dupa eroare si studierea utilizarii diferitelor controlere de tip P, PI, PID.
6. Proiectare unor controlere PI si PID utilizând locul radacinilor într-o structura clasica de reglare.
Preview document

































Conținut arhivă zip
- Cuprins.doc
- Pendulul Inversat.doc
Alții au mai descărcat și

Pendulul invers 1. Tema proiectului o constituie un pendul invers montat pe un carucior actionat de un motor de current continuu avand turatia...

Cap.1.Introducere Tema proiectului o constituie un pendul invers montat pe un cãrucior acţionat de un motor de curent continuu având turaţia...

Proiectul prezintă simularea temperaturii într-o cameră si menţinerea ei la o valoare impusă. Simularea se bazează pe modelul matematic atât al...

Cunoasterea duratei de timp de la semanat pâna la rasaritul plantelor mai are însemnatate si pentru obtinerea unor productii cat mai timpurii. Daca...

Pendulul invers este instabil în orice moment într-o singură direcţie, în afară de faptul când se aplică o forţă de reglare corespunzătoare....

In multe aplicatii este nevoie de un element care sa prezinte 2 stari diferite, cu posibilitatea de a trece dintr-o stare in cealalta, fara sau in...

Cerintele sistemului operational Odata ce a fost definita nevoia si abordarea tehnica, e necesar sa le tranlatam intr-un “scenariu...
Te-ar putea interesa și
Pendulul invers 1. Tema proiectului o constituie un pendul invers montat pe un carucior actionat de un motor de current continuu avand turatia...

INTRODUCERE În cadrul acestei lucrări sunt abordate diferitele tehnici inteligente hibride în scopul controlării unui pendul invers pe o platformă...

Capitolul 1 Introducere 1.1 Micro vehicule aeriene Sistemele autonome sunt de multă vreme în prim-planul atenţiei ingineriei cibernetice, în...

1 Introducere Obiectivul acestei lucrări este studierea unui sistem de reglare automată după stare, aplicat în cadrul unui sistem de laborator,...
Cap.1.Introducere Tema proiectului o constituie un pendul invers montat pe un cãrucior acţionat de un motor de curent continuu având turaţia...

Cap. 1. INTRODUCERE Oscilaţiile prezintă o importanţă covârşitoare pentru fizică şi tehnică, iar dintre ele cele simple, sinusoidale au rol...

Cap. 1. Introducere Pendulul invers este o problema clasica de control. Procesul este neliniar si instabil, cu un singur semnal de intrare si mai...

Tema: Să se proiecteze un regulator fuzzy pentru a regla mărimile de ieşire ale procesului pendul invers Prezentarea procesului Pendulul invers...