Extras din proiect
Sa se proiecteze sistemul de reglare automata a vitezei/pozitiei unui motor de c.c. cu excitatie independenta (flux constant), utilizat pentru o actionare unidirectionala/bidirectionala.
S.R.A. a vitezei/pozitiei, trebuie sa asigure urmatoarele performante:
- suprareglaj ≤ 10%
- eroare stationara nula la treapta de referinta si de perturbatie (cuplu de sarcina)
- limitarea acceleratiei (curentului)/vitezei la maxim 50% prin motor peste curentul nominal (Ilim=1,5In), respectiv la valoarea nominala (in cazul limitarii vitezei in sistemele de pozitionare).
Se alege (in functie de nr. N de ordine din grupa) un S.R.A. cu structura de reglare in cascada pozitie-turatie (viteza) – curent si se considera satisfacatoare performantele obtinute prin proiectarea prin criteriul modulului (varianta Kessler).
- N=1 12 – SRA a vitezei cu limitarea acceleratiei ( curentului)
(N=1 8 – schema unidirectionala ; N=9 12 – schema bidirectionala)
- N= 13 19 – SRA a pozitiei cu limitarea vitezei si acceleratiei; N=19 25 SRA a pozitiei cu limitarea vitezei)
Date caracteristice motor:
- puterea nominala Pn = 2xN [KW]=20kW
- tensiunea nominala Un = 220V
- turatia nominala nn=1500 [rot/min]
- randamentul η = 85%
- rezistenta rotorica RA =1,5-0,05xN [ Ω]
- inductivitate rotorica L A = 10+0,5xN [mH]
- moment de inertie J = 0,6 +0,25xN [Kg*m2]
- moment de inertie utilaj actionat (sarcina) Js=0,1+0,05xN [Kg*m2]- prin reductor cu i=1:10
- traductor de turatie ( tahogenerator 20V/1000 rot/min )
- traductor de pozitie 0-100 mm/ 0 10 V
Alte conditii/date initiale:
- variatia tensiunii retelei: +10% -10%
- caderea de tensiune pe transformator cca. 6%
- tensiunea relativa de scurtcircuit a transformatorului 4,5%
- caderea de tensiune pe bobina de filtrare la trecerea curentului limita 2,5% din Un
Cuprins
1. Alegerea solutiei de automatizare – schema generala a SRA, schema de comanda pentru pornire/oprire cu conditionare – prezenta curentului de excitatie.
2. Dimensionarea convertorului c.a. – c.c., schema trifazata monoalternanta/bialternanta (N- impar respectiv N-par ) – transformator, tiristoare, BCG si alegerea traductoarelor.
3. Calculul functiilor de transfer.
4. Proiectarea regulatoarelor si scheme realizate cu AO.
5. Calculul performantelor dinamice la treapta de referinta 0-1000 rpm/0–100mm (optional modelul de simulare Matlab-Simulink si/sau Power Electronic Library)
Alegerea solutiei de automatizare – schema generala a SRA
Schema de reglare in cascada turatie-curent (similar se extinde structura pentru sistemul de pozitionare cu o bucla exterioara de pozitie) care asigura limitarea curentului de accelerare, utilizeaza un convertor de putere c.a.-c.c. varianta unidirectionala (bidirectionala).
Nota: pentru schemele de reglare bidirectionale se completeaza corespunzator structura cu un convertor in antiparalel).
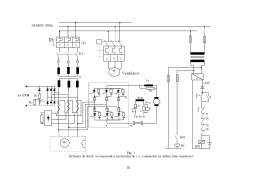
Fig.1
Schema de reglare a vitezei (turatiei) cu limitarea curentului prin motorul de c.c.
Reg n – regulator de viteza (turatie)
Reg i – regulator de curent
(Reg p – regulator de pozitie)
BCG – bloc de comanda pe grila
M- motor de c.c.
Trad i – traductor de current (sunt de masura+ adaptor de semnal)
Tg – traductor de turatie (tahogenerator)
(Tp – traductor de pozitie liniara pe o axa 0 100 mm)
L- bobina de filtrare - limitare
T – transformator de alimentare ( de forta) al convertorului static de putere
Ts – transformator de sincronizare
DPS – dispozitiv protectie la scurtcircuit
Preview document
















Conținut arhivă zip
- Proiectarea Sistemului de Reglare Automata a Vitezei-Pozitiei unui Motor cu Excitatie Independenta.doc
Alții au mai descărcat și

CAPITOLUL 1 PROBLEMATICA SISTEMELOR DINAMICE 1.1. Aspecte generale privind noţiunea de sistem În general noţiunea de sistem este utilizată în...

1. Tema de proiect 1.1. Proiectarea unui sistem de reglare automată de reglarea turaţiei unui motor de curent continuu utilizând regulatoare...

Cunoasterea duratei de timp de la semanat pâna la rasaritul plantelor mai are însemnatate si pentru obtinerea unor productii cat mai timpurii. Daca...

In multe aplicatii este nevoie de un element care sa prezinte 2 stari diferite, cu posibilitatea de a trece dintr-o stare in cealalta, fara sau in...

Cerintele sistemului operational Odata ce a fost definita nevoia si abordarea tehnica, e necesar sa le tranlatam intr-un “scenariu...
Te-ar putea interesa și

Ecuaţia de mişcare a trenului În cazul general, un tren este compus din una sau mai multe unităţi motoare (locomotive, vagoane motoare), care...

1.Alegerea solutiei de automatizare – schema generala a SRA Schema de reglare in cascada turatie-curent (similar se extinde structurai pentru...

Sistem de reglare automat al turatiei unui motor de curent continuu cu excitatie independenta cu regulatoare conventionale PID. II. Schema de...