Extras din proiect
Generalităţi
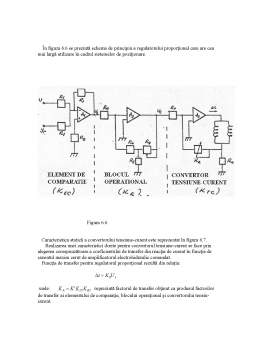
Regulatorul automat are rolul de a prelua operaţional semnalul de eroare, (obţinut în urma comparaţiei liniar-aditive a mărimii de intrare r si a mărimii de reactie y r , în elementul de comparaţie) si de a elabora la iesire un semnal de comanda u pentru elementul de execuţie, figura 1.
Informaţiile curente asupra desfăşurării procesului tehnologic se obţin cu ajutorul traductorului de reacţie şi sunt prelucrate de regulatorul automat în conformitate cu o anumită lege care defineşte algoritmul de reglare automată. Algoritmii de reglare (legile de reglare) convenţionali, utilizati frecvent în reglarea proceselor tehnologice sunt de tip proportional-integral-derivativ (PID).
Figura 1.
Implementarea unei anumite legi de reglare se poate realiza printr-o varietate destul de largă a construcţiei regulatorului, ca regulator electronic, pneumatic, hidraulic sau mixt.
Chiar şi în cadrul aceleiaşi categorii constructive se pot realiza variante diferite, fiecare soluţie oferind anumite avantaje din punct de vedere al preciziei de realizare a legii de reglare, a preţului, a siguranţei în funcţionare şi a flexibilităţii în exploatare.
O clasificare generală a regulatoarelor automate:
1. Dupa caracteristicile de transfer ale instalaţiei tehnologice :
- Regulatoare cu caracteristici de transfer invariante folosite în urmatoarele categorii de sisteme:
- sisteme de stabilizare automată (r = ct.);
- sisteme de reglare cu program (r = f(t) cunoscut);
- sisteme de urmărire (r = f(t) necunoscut aprioric
-Regulatoare cu caracteristici de transfer variabile:
a) regulatoare adaptive;
b)regulatoare instruibile;
c)regulatoare extremale (optimizatoare automate).
- Dupa viteza de răspuns a instalaţiei tehnologice:
a) regulatoare pentru procese rapide;
b)regulatoare pentru procese lente.
-Dupa numarul marimilor de iesire ale instalatiei tehnologice:
a) regulatoare monovariabile;
-b)regulatoare multivariabile.
2. Dupa caracteristicile constructive şi functionale ale regulatoarelor
- Dupa tipul acţiunii regulatorului:
a)regulatoare cu actiune continua, liniare sau neliniare;
b)regulatoare cu acţiune discretă, cu impulsuri modulate sau numerice.
- Dupa construcţia blocului regulator si a semnalelor folosite:
a) regulatoare unificate;
b) regulatoare specializate.
- Dupa natura purtătorului de informaţie:
a) regulatoare electronice;
b) regulatoare pneumatice;
c) regulatoare hidraulice;
d) regulatoare mixte (electrohidraulice, electropneumatice).
- Dupa tipul reacţiei folosite:
a) regulatoare cu reacţie după mărimea de iesire;
b) regulatoare cu reacţie dupa variabilele de stare (regulatoare cu estimatoare de stare).
- Dupa modul de instalare:
a) regulatoare de panou;
b) regulatoare locale.
Preview document



















Conținut arhivă zip
- Regulatoare Electronice pentru Comanda Servovalvelor Electrohidraulice.doc
Alții au mai descărcat și

Aparatele electronice pentru măsurarea mărimilor neelectrice, deşi de o mare diversitate, au în general o structură comună care este prezentată,...

Cunoasterea duratei de timp de la semanat pâna la rasaritul plantelor mai are însemnatate si pentru obtinerea unor productii cat mai timpurii. Daca...

In multe aplicatii este nevoie de un element care sa prezinte 2 stari diferite, cu posibilitatea de a trece dintr-o stare in cealalta, fara sau in...

Cerintele sistemului operational Odata ce a fost definita nevoia si abordarea tehnica, e necesar sa le tranlatam intr-un “scenariu...
Te-ar putea interesa și

1. SISTEMATICA COMENZILOR MOTOARELOR HIDRAULICE PRIN REZISTENTE HIDRAULICE Reglarea vitezei de deplasare a motoarelor hidraulice se poate face în...

1.Consideraţii generale privind construcţia si funcţionarea motoarelor hidraulice cu pistoane axiale si bloc înclinat. Motoarele hidraulice se...

Actionari - Laborator 1 Determinarea factorului de putere necompensat Datele problemei: P=40W, RL=1©/95W, RS=15©/95W, U=130V, KW=5W/div,...