Extras din proiect
CAPITOLUL 1
1.STRUCTURA GENERALĂ A UNUI SISTEM DE CONDUCERE
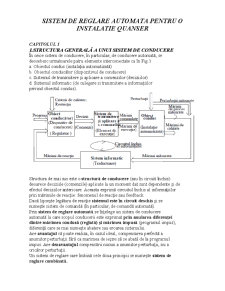
În orice sistem de conducere, în particular, de conducere automată, se
deosebesc urmatoarele patru elemente interconectate ca în Fig.1
a. Obiectul condus (instalaţia automatizată)
b. Obiectul conducător (dispozitivul de conducere)
c. Sistemul de transmitere şi aplicare a comenzilor (deciziilor)
d. Sistemul informatic (de culegere si transmitere a informaţiilor
privind obiectul condus).
Structura de mai sus este o structură de conducere (sau în circuit închis)
deoarece deciziile (comenzile) aplicate la un moment dat sunt dependente şi de
efectul deciziilor anterioare. Aceasta exprimă circuitul închis al informaţiilor
prin mărimile de reacţie: fenomenul de reacţie sau feedback.
Dacă lipseşte legătura de reacţie sistemul este în circuit deschis şi se
numeşte sistem de comandă (în particular, de comandă automată).
Prin sistem de reglare automată se înţelege un sistem de conducere
automată la care scopul conducerii este exprimat prin anularea diferenţei
dintre mărimea condusă (reglată) şi mărimea impusă (programul impus),
diferenţă care se mai numeşte abatere sau eroarea sistemului.
Are avantajul că poate realiza, în cazul ideal, compensarea perfectă a
anumitor perturbaţii fără ca marimea de ieşire să se abată de la programul
impus. Are dezavantajul compensării numai a anumitor perturbaţii, nu a
oricăror perturbaţii.
Un sistem de reglare care îmbină cele doua principii se numeşte sistem de
reglare combinată.
1.1SISTEME DE REGLARE CONVENŢIONALĂ (SRC)
Structura SRC
Prin sistem de reglare convenţională (SRC) se înţelege un sistem de reglare
automată cu o singură intrare, o singura ieşire la care informaţia despre
realizarea programului de reglare este exprimată numai prin eroarea (abaterea)
sistemului ca diferenţa între mărimea impusă si mărimea de reacţie.
Structura generală a unui sistem de reglare convenţională este prezentată în
Fig.1. unde se evidenţiază denumirea elementelor şi mărimilor componente
Figura nr.1
Elementele componente ale unui SRC
a. Instalaţia tehnologică (IT):
Reprezintă obiectul supus automatizării în
care mărimea de ieşire yIT este mărimea care trebuie reglată iar mărimea de execuţie
este una din mărimile de intrare aleasă ca mărime de comandă a ieşirii.
Restul mărimilor de intrare, care nu pot fi controlate în această structură capătăstatutul
de perturbaţii.
Alegerea mărimii de execuţie se face pe baza urmatoarelor criterii
principale:
- posibilitatea modificării ieşirii în domeniul cerut când perturbaţiile
acţionează în limite cunoscute;
- posibilitatea modificării ei printr-un element de execuţie convenabil;
- respectarea unor considerente tehnologice.
Preview document

































Conținut arhivă zip
- Sisteme de Reglare.pdf
Te-ar putea interesa și

REZUMAT În lucrare în baza analizei structurii consumului de căldură în industrie, eficienţei energetice a termoficării, uztilizării instalaţiilor...

Capitolul I PREZENTAREA GRUPULUI DACIA - RENAULT 1.1. ISTORIC DACIA 1.1.1. Începuturile Născută ca fabrica de piese de avion în 1943,...

1. Argument Omul, ca fiinţă superioară, a fost preocupat din cele mai vechi timpuri de a cunoaşte şi stăpâni natura, de a dirija fenomene ale...

1.1 Generalitati Prin automatizarea proceselor de productie se urmareste eliminarea interventiei directe a omului în aceste procese, asigurându-se...

CAPITOLUL 1 SISTEME DE REGLARE AUTOMATĂ 1.1. Noțiuni introductive Sistemele de reglare automată (SRA) sau pe scurt, automatizarea, sunt des...

CARACTERISTICILE SISTEMULUI "IVAC" Un sistem IVAC (Instalatie de ventilatie si aclimatizare) corect proiectat poate asigura un mediu confortabil...

CAPITOLUL 1 PROBLEMATICA SISTEMELOR DINAMICE 1.1. Aspecte generale privind noţiunea de sistem În general noţiunea de sistem este utilizată în...

ARGUMENT Prin automatizarea unor procese se urmăreşte eliminarea intervenţiei directe a omului în acestea, asigurându-se desfăşurarea lor în...