Extras din proiect
Înclinarea braţelor macaralelor poate fi concepută ca mişcare de lucru (sub sarcină) sau doar ca mişcare de schimbare a poziţiei acestora, fără sarcină. În primul caz se urmăreşte deplasarea sarcinii în raza de acţiune a macaralei, iar în cel de-al doilea caz se urmăreşte corelarea razei de acţiune a braţului macaralei cu valoarea sarcinii, astfel încât să nu se depăşească momentul nominal al macaralei.
Înclinarea sub sarcină trebuie efectuată cu viteză relativ mare, întrucât durata ei influenţează productivitatea macaralei, fiind o mişcare frecventă, pe când înclinarea pentru schimbarea poziţiei braţului este puţin frecventă şi poate fi efectuată cu viteză redusă. La macaralele la care înclinarea braţului nu este mişcarea de lucru, deplasarea orizontală a sarcinii se realizează prin deplasarea întregii macarale.
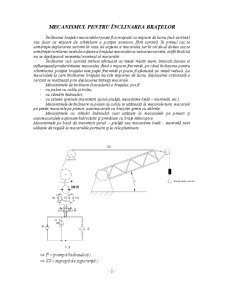
Mecanismele de înclinare (basculare) a braţului, pot fi:
- cu palan cu cablu şi troliu;
- cu cilindrii hidraulici;
- cu sisteme speciale (transmisii şurub-piuliţă, mecanisme bielă – manivelă, etc.).
Mecanismele de înclinare cu palan cu cablu se utilizează la macarale turn, macarale pe şenile, macarale pe pneuri, automacarale cu braţ din grinzi cu zăbrele.
Mecanismele cu cilindri hidraulici sunt utilizate la macaralele pe pneuri şi automacaralele acţionate hidrostatic şi prevăzute cu braţe telescopice.
Mecanismele pe bază de transmisii şurub – piuliţă sau mecanisme bielă - manivelă sunt utilizate de regulă la macaralele portuare şi la cele plutitoare.
- P – pompă hidraulică ;
- SS – supapă de siguranţă ;
- F – filtru ;
- D – distribuitor ;
- D1 , D2 – drosele ;
- SS1 , SS2 – supape de sens ;
- T – rezervor ;
Preview document




Conținut arhivă zip
- Automate Programabile - Simularea si Automatizarea unui Brat de Macara.doc
- macara12.zm2
Alții au mai descărcat și

Adăugarea de câmpuri la o tabelă se face în modul de vizualizare:...... Previzualizare inaintea imprimarii Aplicarea unei restrictii de...



3.Introducere in bd si sgbd-uri Definitie: Numim baza de date o colectie partajata de date aflata in interdependenta logica impreuna cu o...