Extras din proiect
Analiza de poziții pentru structura roboților industriali
Analiza de poziție utilizând matricile de transformare
Ca mod de utilizare a acestei metode în studiul analizei de poziție, evidențiem următoarea metodologie:
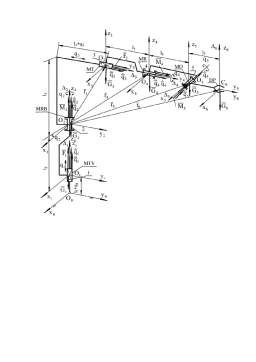
pe baza modelului fizic sau al proiectului manipulatorului sau robotului, se realizază schema cinematică structurală;
se înscrie în fiecare cuplă, sistemul de coordonate, propriu corpului respectiv, ținând cont de tipul gradului de mobilitate introdus de cupla respectivă;
se reprezintă pe schema cinematică structurală , toate elementele de tip〖 l〗_i,φ_i;
se înscriu în fiecare cuplă, coordonatele robot q_i;
se scriu relațiile matriciale de trecere a vectorului de poziție relativa a punctului caracteristic față de propriul sistem cartesian, în sistemul cartesian fix;
pe baza ecuațiilor obținute, se rezolvă, at problema cinematică directă, cât și problema cinematică inversă si se determină dependența funcțională a preciziei a preciziei de poziționare, funcție de coordonatele relative și elementele geometrice.
Analiza de poziții utilizând matricile de transfer de tip 3×3
Metoda se aplică atât sistemelor de corpuri cu lanțuri cinematice deschise cât și sistemelor de corpuri cu lanțuri cinematice inchise. Definim ca fiind un lanț cinematic deschis, lanțul cinematic în care numărul de cuple este egal cu numărul de corpuri mobile.(k=n)
Definim ca fiind un lanț cinematic închis, lanțul cinematic în care numarul de cuple este mai mare decât numarul de corpuri mobile (k>n). Numărul de cicluri se definește ca fiind diferența dintre numărul de cuple și numărul de corpuri mobile( c= k-n).
Preview document































Conținut arhivă zip
- Analiza dinamica pentru un robot TRTRR.docx