
Extras din proiect
A. STRUCTURA COMPLETA A LANTULUI CINEMATIC PROIECTAT VA INCLUDE:
1. Un element mobil de tip platou cu patru puncte de ghidare sustinere, materializate prin tanchete cu bile pe 4 randuri.
2. Un sistem de actionare a elementului mobil de tip mecanism șurub conducător-piuliță cu bile, cu doua piulite si pretensionare externa.
3. Un sistem de lagaruire a surubului conducator cu lagare cu rulmenti radial-axiali cu bile cu contact unghiular, cu montarea rulmentilor in casete lagar tipizate corp prismatic cu talpa.
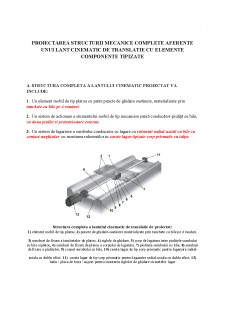
Structura completa a lantului cinematic de translatie de proiectat:
1) element mobil de tip platou, 2) puncte de ghidare-sustinere materializate prin tanchete cu bile pe 4 randuri,
3) suruburi de fixare a tanchetelor de platou, 4) riglele de ghidare, 5) corp de legatura intre piulitele surubului cu bile siplatou, 6) suruburi de fixare de platou a corpului de legatura, 7) piulitele surubului cu bile, 8) suruburi de fixare a piulitelor, 9) corpul surubului cu bile, 10) caseta lagar de tip corp prismatic pentru lagaruire radial-
axiala cu dublu efect, 11) caseta lagar de tip corp prismatic pentru lagaruire radial-axiala cu dublu efect, 13) batiu / placa de baza / suport pentru montarea riglelor de ghidare sicasetelor lagar
B. ETAPE DE CALCUL NECESAR A FI PARCURSE:
1. Stabilirea setului de date generale de calcul pentru tema de proiect.
2. Elaborarea ciclogramelor si schemelor de calcul pentru ansamblurile partiale de proiectat.
3. Stabilirea seturilor de date de intrare specifice necesare pentru efectuarea calculelor de proiectare a fiecarei categorii de componente tipizate (parametrii constructiv-functionali pentru fiecare ansamblu partial de proiectat).
4. Determinarea incarcarilor aplicate elementului mobil si reducerea acestora pe puncte de ghidare - sustinere a platoului. Calculul de predimensionare, alegere preliminara si verificare pentru ghidajele de tip tanchete cu bile integrate elementului mobil.
5. Determinarea incarcarilor aplicate ansamblului partial surub conducator - piulita cu bile - lagare. Calculul de predimensionare, alegere preliminara si verificare pentru componentele ansamblului partial surub conducator - piulita cu bile - lagare.
C. PARTEA GRAFICA DE REALIZAT PENTRU PROIECTAREA ANSAMBLULUI SUSMENTIONAT VA INCLUDE:
1. Sectiunea transversala prin elementul mobil actionat, sistemul de ghidare a acestuia (de tip ghidaje cu tanchete cu bile) si respectiv elementul de legatura dintre platou si piulitele surubului cu bile / corpul surubului.
2. Sectiunea longitudinala prin casetele lagar tipizate, mecanismul surub-piulita cu bile, si respectiv elementul de legatura dintre platou si surubul cu bile, cu reprezentarea in vedere din lateral si a tanchetelor cu bile ce sustin platoul.
3. Cele trei vederi ortogonale (din lateral, de sus si frontala) pentru sistemul proiectat.
D. DATE GENERALE DE CALCUL PENTRU TEMELE DE PROIECT
D1. Parametriiconstructiv-functionaligeneralipentrusistemul de proiectatsunturmatorii
Date generale de calcul: i=8 ; j=2 ; tip lagaruire=bile.
- Cursamaximăimpusa:
- 800 + 50 * 8 =1200 mm
- Dimensiunileelementuluimobilechipat cu tanchete:
- 450 mm x 320 mm x 100 mm
- Sarcinaaditionalapreluata de elementulmobilpeparcursulunei faze de lucru
- forțele de aschiere: - Fx = Fz = 800 + 8*100 =1600 N
- Fy = 1000 + 100*8 =1800 N
- Vitezamaximă de deplasare a elementuluimobilpentrucursele de apropiere / retragererapida :
- Vmax1 = Vmax3 = 12 m/min =0,2 m/s
- Viteza maxima pentrufaza de lucru:
- Vmax2 = Vmax1 / 2 = 6 m/min =0.1 m/s
- Timpii de accelerare / frânarepentrutoatefazeleciclului de lucru:
- ta = tf = 0.5 s
- Dimensiunilesemifabricatuluiprelucrat:
Liexpressimion
- 300x200x100 mm, otel (densitate 7800 kg/m3)
S1=0.5*0.1=0.05[m/s]
s2=0.2*2=0.4[m/s]
s3=0.5*0.2=0.05[m/s]
s4=0.05=0.025[m/s]
s5=0.2[m/s]
s6=0.05=0.025[m/s]
s7=0.1=0.05[m/s]
s8=0.65[m/s]
s9=0.05[m/s]
Stotal=1.5[m/s]
v=s/t ; t=s/v
t8=0.65/0.2=3.25s
t2=2s
t5=2s
ttotal=10.25s
a=(v2-v1)/(t2-t1)
a1=Vmax/t1=0.2/0.5=0.4[m/s*s]
a2=0[m/s*s]
a3=-0.4[m/s*s]
a4=0.2[m/s*s]
a5=0[m/s*s]
a6=-0.2[m/s*s]
a7=-0.4[m/s*s]
a8=0[m/s*s]
a9=0.4[m/s*s]
Distantapedirectielongitudinalaintrecentrele de calcul al tachetelor LW = 350 [mm]
Distantapedirectietransversalaintrecentrele de calcul al tachetelor LS = 200 [mm]
Locatiaaxei de miscare a elementuluimobilpedirectiaaxei y-direction Ly = 0 [mm]
Locatiaaxei de miscare a elementuluimobilpedirectiaaxei z-direction Lz = 0 [mm]
Locatiaunghiulara a planului in care suntdispuseriglele de ghidare in raport cu axa X = 0˚
Locatiaunghiulara a planului in care suntdispuseriglele de ghidare in raport cu axa X β = 0˚
Locatiacentrului de greutate a platouluipedirectiaaxei x xS = 0 [mm]
Locatiacentrului de greutate a platouluipedirectiaaxei y yS = 0 [mm]
Locatiacentrului de greutate a platouluipedirectiaaxei z zS = 0 [mm]
Masa platouluiechipat cu tanchetemP = 112 [kg]
Masa obiectului cu care se incarca platoul
Faza1:1
F_1=GM=m_M*g=1100 N
m_M =0.45*0.32*0.1*7800=112[kg]
ρ=m/v
dimensiunile semifabricatului prelucrat
300x200x100
F_1X=0 x_1=0
F_1Y=0 y_1=0
Preview document







































Conținut arhivă zip
- Elemente selectate BAZE CAD
- capat surub.dwg
- flansa.DWG
- mijloc tanchete.DWG
- piulita.DWG
- rul.DWG
- surub.DWG
- tanchet.DWG
- Componente mecanice tipizate.docx
- parte grafica cmt.bak
- parte grafica cmt.dwg
- parte grafica cmt.pdf
Alții au mai descărcat și

Sa se proiecteze procesul tehnologic si stanta sau matrita pentru obtinerea piesei din figura 1. Materialul utilizat este TDA3 ( tabla decapata...
Te-ar putea interesa și

Memoriu de prezentare Activitatea umană s-a orientat întotdeauna spre realizarea unei vieţi mai bune, spre eliberarea parţială sau totală de...

Analiza constructiv-funcţională a princioalelor tipuri de rezervoare atmosferice de depozitare a produselor volatile Prin rezervoare se înţeleg...

CAPITOLUL I - EXPLICAŢII PRELIMINARE CU PRIVIRE LA INFRACŢIUNEA DE FALS Secţiunea I GENERALITĂŢI Faptele incriminate sub denumirea de...

CAPITOLUL 1 ANALIZA CONSTRUCTIV-FUNCTIONALA A PRINCIPALELOR TIPURI DE REZERVOARE ATMOSFERICE UTILIZATE LA DEPOZITAREA PRODUSELOR PETROLIERE...

INTRODUCERE Scopul proiectului de an la disciplina Organe de masini este sa dezvolte abilitatile practice ale studentilor de proiectare si...

Scopul proiectului de an la disciplina Organe de maşini este să dezvolte abilităţile practice ale studenţilor de proiectare şi sintetizare a...

Cap. I Analiza constructiv-funcţională a princioalelor tipuri de rezervoare atmosferice utilizate la depozitarea produselor petroliere...

TEMA DE PROIECT Să se proiecteze o transmisie mecanica actionata de un motor electric, asincron, de current alternative ME. Transmisia se compune...