Cuprins
- 1. Generalități 2
- 2. Modele privind stategiile de deplasare a roboților bipezi 3
- 3.Modele de deplasare a elementului de execuție pentru
- pedipulatori 7
- 4..Modele de deplasare a platformei roboților bipezi 9
- 5.Deplasarea platformei în sistemul start-stop 10
- 5.1 Modelul de deplasare cu legea de mișcare liniară 10
- 5.2. Modelul de deplasare cu legea de mișcare parabolică 12
- 5.3. Modelul de deplasare cu legea de mișcare sinusoidal 15
- 6. METODE STRUCTURALE PENTRU ROBOTI BIPEZI 18
- 6.1. Modele structurale directe 18
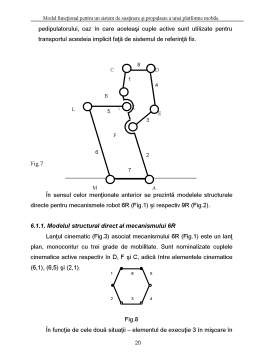
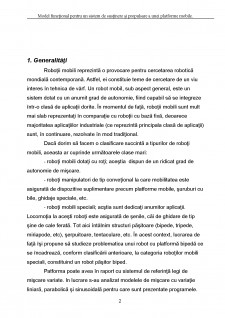
- 6.1.1. Modelul structural direct al mecanismului 6R 20
- 6.1.2. Modelul structural direct al mecanismului 9R 21
- 6.2. Modele structurale inverse 23
- 6.2.1. Modelul structural invers al mecanismului 6R 23
- 6.2.2. Modelul structural invers al mecanismului 9R 23
- 7. ALGORITMUL PROGRAMULUI DE MODELARE A
- DEPLASĂRII ROBOȚILOR BIPEZI 25
- 8. MODELAREA DEPLASĂRII ROBOTULUI BIPED 9R ÎN
- SISTEM START-STOP 29
- 9. PROGRMUL DE MODELARE CINEMATICA SI
- DINAMICA A DEPLASARII IN SISTEMUL
- START-STOP A ROBOTULUI BIPED 9R 42
- 10. Bibliografie 60
Extras din referat
1. Generalități
Roboții mobili reprezintă o provocare pentru cercetarea robotică mondială contemporană. Astfel, ei constituie teme de cercetare de un viu interes în tehnica de vârf. Un robot mobil, sub aspect general, este un sistem dotat cu un anumit grad de autonomie, fiind capabil să se integreze într-o clasă de aplicații dorite. În momentul de față, roboții mobili sunt mult mai slab reprezentați în comparație cu roboții cu bază fixă, deoarece majoritatea aplicațiilor industriale (ce reprezintă principala clasă de aplicații) sunt, în continuare, rezolvate în mod tradițional.
Dacă dorim să facem o clasificare succintă a tipurilor de roboți mobili, aceasta ar cuprinde următoarele clase mari:
- roboți mobili dotați cu roți; aceștia dispun de un ridicat grad de autonomie de mișcare.
- roboți manipulatori de tip convețional la care mobilitatea este asigurată de dispozitive suplimentare precum platforme mobile, șuruburi cu bile, ghidaje speciale, etc.
- roboți mobili speciali; acștia sunt dedicați anumitor aplicații. Locomoția la acești roboți este asigurată de șenile, căi de ghidare de tip șine de cale ferată. Tot aici întâlnim structuri pășitoare (bipede, tripede, miriapode, etc), șerpuitoare, tentaculare, etc. În acest context, lucrarea de față își propune să studieze problematica unui robot cu platformă bipedă ce se încadrează, conform clasificării anterioare, la categoria roboților mobili speciali, constituind un robot pășitor biped.
Patforma poate avea în raport cu sistemul de referință legi de mișcare variate. In lucrare s-au analizat modelele de mișcare cu variație liniară, parabolică și sinusoidală pentru care sunt prezentate programele.
2. Modele privind stategiile de deplasare a roboților bipezi
Din analiza modului de deplasare a unor roboți bipezi, rezultă că în cazul acestei categorii de roboți există două sisteme de deplasare în raport cu poziția inițială adoptată ca fiind cea în care picioarele sunt paralele și plasate simetric în raport cu platforma, și anume:
- mișcarea platformei se realizează în sistemul start-stop în trei timpi (Fig.1). In prima faza unul dintre picioare ramâne pe sol, are loc mișcarea piciorului conex în poziția următoare în raport cu platforma și amplasarea sa pe sol. In timpul al doilea timp piciorul prim sau ambele determină deplasarea platformei într-o nouă poziție de referință. In timpul al treilea are loc mișcarea acestui picior în raport cu platforma acesta fiind adus paralel cu cel amplasat pe sol și așezat pentru susținerea platformei.
Fig.1
Pentru vizualizarea modelului de deplasare s-a realizat animația pentru o platformă bipedă dotată cu două pedipulatoare cu o structură plană 6R.
Modelul acestui pedipulator este redat în Fig.2;
Fig.2
- mișcarea platformei se realizează continuu astfel încât alternativ unul dintre picioare este în transport în raport cu aceasta, piciorul de sprijin determinând în general mișcarea acesteia (Fig.3).
Bibliografie
1. Antonescu, P., Mecanisme, Editura PRINTECH, București, 2003.
2. Comănescu Adriana, Dinu Comănescu, Ileana Dugăeșescu, Adrian Boureci. , Bazele modelării mecanismelor, București : Politehnica Press, 2010
3. Comănescu, Adr., Antonescu, P., Grecu, B., Îndrumar de proiect la mecanisme - partea II, Litografia Institutului Politehnic București, 1987.
4. Comănescu, Adr., Comănescu, D., Georgescu, L., Bazele analizei și sintezei mecanismelor cu memorie rigidă, Editura POLITEHNICA PRESS, București, 2008.
5. Comănescu, Adr., Sisteme modulare de calcul cineto - dinamic al grupelor modulare active și pasive, Proc.of SYROM’85, București, 1985.
6. Grecu, B., Comănescu, Adr., Terme, D., Mecanisme - Modele structurale și cinematice, Editura Bren, București, 2001.
7. http://www.scribd.com/doc/46707366/Platforma-robotica-mobila
8. http://ro.wikipedia.org/wiki/Robot
9. Tempea, I., Dugăeșescu, I., Proiectarea mecanismelor, Editura Printech, București, 2005.
Preview document


























































Conținut arhivă zip
- Model functional pentru un sistem de sustinere si propulsare a unei platforme mobile.doc
Alții au mai descărcat și

Un solid-state drive (expresie engleză cu traducerea liberă „unitate cu cipuri”; prescurtat SSD) este un dispozitiv de stocare a datelor care...

Abstract Datorită expansiunii internetului și a fluxului de date transmis online din ultimii ani, cele mai numeroase atacuri din secolul XX au...

1) Fiecărui nod iÎV i s-a asociat o variabilă d(i) numită în continuare eticheta nodului i. Prin definiție d(s) = 0 . În oricare moment al...

INTRODUCERE România în mișcare este un proiect care are scop evidențierea necesității sistemelor adaptive complexe în viața unui om. Având în...

BCE Seminar 1 Sistemele dinamice discrete Clasificare: Un sistem dinamic discret este o secven.a de func.ii yt, care exprima valorile...

Aspecte generale ale proiectării sistemelor informatice - Proiectarea sistemului informatic constă în stabilirea soluțiilor logice și specificarea...