
Extras din referat
Un sistem liniar continuu (SL) este o retea cu un numar finit de receptori pentru intrare, care primesc semnale externe si cu un numar finit de terminale de iesire, cu ajutorul carora se pot masura sau observa iesirile (rezultatele); reteaua insasi constã dintr-un numãr finit de componente primare interconectate unele cu altele, cu receptorii de intrare si cu terminalele de iesire. Multimea considerata pentru variabila timp este T=R.
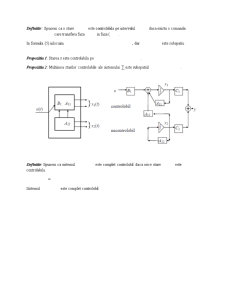
Consideram sistemul continuu:
Σ∶x ̇(t)=A(t)x(t)+B(t)u(t) (1)
conditia initiala∶x(t_0 )=x_(0 ) (2)
unde x(t),x_0∈R^n,u(t)∈R^m, t,t_0∈R . Functia de intrare u este presupusa masurabila si marginita pe orice interval de timp marginit.
Matricea fundamentala
Consideram problema Cauchy formata din :
Un sistem de ecuatii diferentiale (SED)
x ̇(t)=A(t)x(t) (1’) SED liniar si omogen
Conditia initiala
x(t_0 )=x_(0 )
A(t) matricea n×n cu elementele a_ij (t) functii continue pe R.
Notam cu x_1 (t),x_2 (t),…,x_n (t) solutiile(vectori) a n probleme Cauchy :
{█((x_1 ) ̇(t)=A(t) x_1 (t)@x_1 (t_0 )=e_1=[(1¦0)¦(…¦0)] )┤ ;{█((x_2 ) ̇(t)=A(t) x_2 (t)@x_2 (t_0 )=e_2=[(0¦1)¦(…¦0)] )┤; … ;{█((x_n ) ̇(t)=A(t) x_n (t)@x_n (t_0 )=e_n=[(0¦0)¦(…¦1)] )┤.
Definitie: Matricea formata cu coloanele x_1 (t),x_2 (t),…,x_n (t) se numeste matricea fundamental a matricei A(t).
Formula starii sistemului la momentul t :
x(t)=ϕ(t,t_0 )∙x_0+∫_(t_0)^t▒ϕ(t,s)B(s)u(s)ds (3)
Problema care se pune este de a aduce sistemul dintr-o stare „initiala” data x_0
într-o stare „finala” x_1 într-un interval finit de timp – acest lucru nu se poate face
decât alegând în mod convenabil intrarea u(∙), care din acest motiv se mai numeste si
comanda.
Pentru un SL care nu este stationar valoarea momentului initial este foarte
importantã pentru studiul comportamentului ulterior al sistemului.
Definitie: O pereche de forma (t,x ̃)∈R×R^n , se numeste faza daca x ̃ este starea sistemului la momentul t , adica x(t)=x ̃ .
Perechea (t_0,x_0) este o faza , faza initiala .
Fixam un interval [t_0,t_1]
Definitie: Spunem ca o comanda u:[t_0,t_1]→R^m transfera faza (t_0,x_0) in faza (t_1,x_1) daca in (3)
x(t_1 )=x_1 ,adica x_1=x(t_1 )=ϕ(t_1,t_0 )∙x_0+∫_(t_0)^(t_1)▒ϕ(t_1,s)B(s)u(s)ds (4)
Definitie : Matricea C(t_0,t_1 )=∫_(t_0)^(t_1)▒ϕ(t_0,s)B(s) 〖B(s)〗^T 〖ϕ(t_0,s)〗^T ds se numeste gramianul de controlabilitate al sistemului ∑ .
Teorema transferului de faze
Exista o comanda u:[t_0,t_1]→R^m care transfera faza (t_0,x_0) in faza (t_1,x_1) ⇔x_2≔ϕ(t_0,t_1 )∙x_(1 )- x_0∈Im C(t_0,t_1 ). (5)
Preview document



Conținut arhivă zip
- Controlabilitatea sistemelor continue.docx
Te-ar putea interesa și

CAPITOLUL I Introducere în filtre Kalman 1 .Introducere Teoretic, un filtru Kalman este un estimator pentru problema liniar pătratică. Aceasta...

1. Generalităţi. Clasificare Variatoarele de tensiune continuă (VTC) sau chopperele sunt convertoare de curent continuu care transformă energia...

1. Prezentarea societatii Prezentul proiect a fost întocmit în cadrul unei societati de distributie de produse alimentare si nealimentare,...

1. Auditul –Noţiuni introductive Timpul pe care îl traim este caracterizat de ample procese de reforma economică si financiară, ale căror...

INTRODUCERE Într-o economie globală şi bazată pe cunoştinţe, în care informaţia reprezintă al doilea factor important după resursele umane,...


Pentru a crea premisele favorabile trecerii la Societatea Informaţională, Uniunea Europeană a elaborat încă din anul 1993 o serie de decizii...

Auditarea sistemelor informatice s-a constituit intr-un process, care la inceput, a fost mai degraba sustinut ,decat condus dupa metode...