Extras din curs
C1.I Structura SAE. Un SAE este un sistem fizic realizat prin interconectarea unor dispozitive mecanice, electrice, electromagnetice, electronice, utilizate în scopul conversiei electromecanice a energiei utilă unui proces tehnologic. Adesea, SAE asigură şi reglarea vitezei, fie prin intermediul motorului electric fie prin intermediul transmisiei mecanice. Alături de acţionările electrice, în practică se folosesc acţionările hidraulice sau acţionările pneumatice. În cazul maşinilor complexe, întâlnim adesea acţionări combinate: electro-hidraulice, electro-pneumatice.
Un SAE are 3 părţi principale: maşina electrică ME, transmisia T şi mecanismul de lucru ML.
1. Maşina electrică ME funcţionează ca motor, transformând energia electrică în energie mecanică. În practică se folosesc atât motoare de c.a. (sincrone, asincrone), cât şi motoare de c.c., din ce în ce mai rar rotative sau liniare.
În anumite regimuri tranzitorii de frânare sau de coborâre în cazul cuplurilor de tip potenţial ME funcţionează ca frână cu recuperare sau fără recuperare, transformând energia mecanică primită de la ML în energie electrică furnizată reţelei de alimentare sau disipată prin efect Joule.
2. Transmisia mecanică T pune de acord viteza motorului cu viteza mecanică de lucru. Transferă energia mecanică de la motor la mecanismul de lucru. Raportul de transmisie este: i=Ω/ΩR. Uneori transmisia mecanică poate lipsi (acţionări cu motoare liniare). Dacă motorul este rotativ, iar mecanismul de lucru are mişcare liniară, transmisia conţine şi dispozitive de conversie a mişcării (bielă-manivelă, şurub-piuliţă, melc-roată melcată).
3. Mecanismul de lucru ML primeşte energia mecanică de la transmisie şi o transformă în lucru mecanic util unui proces. În practică se folosesc şi echipamente auxiliare a căror complexitate depinde de cerinţele procesului tehnologic.
SAE funcţionează fie în circuitul deschis, fie în circuitul închis. SAE funcţionând în regim deschis este format din: blocul de comandă BC, dispozitivul de execuţi DE şi blocul de măsură BM. BM conţine senzori şi traductoare de mărimi electrice şi neelectrice. DE conţine contactoare, întreruptoare, variatoare de tensiune continuă sau alternativă, redresoare comandate, convertizoare de frecvenţă. Prin intermediul lor se reglează fluxul de energie dinspre sursă spre motor. BC conţine: butoane, selectoare, comutatoare cu ajutorul cărora iniţiază procesul de pornire, frânare, schimbarea vitezei, etc.
SAE funcţionând în regim închis cu comandă analogică mai conţine: blocul de reglare BR care are: regulatoare (de viteză, de curent, de tensiune) care compară valoarea reală a mărimii reglate cu valoarea precisă sau impusă şi comandă dispozitivul de execuţie în scopul egalării dintre valoarea reală şi cea impusă; blocul de precizie BP care are componente sau circuite analogice cu ajutorul cărora se stabileşte valoarea dorită (impusă, precisă) a mărimii reglate. SAE cu comandă numerică mai conţine şi operatorul, tastatura ID şi calculatorul de proces CP.
C1.II Performanţele SAE se asociază prin intermediul indicatorilor de calitate care pot fi: energetici, tehnici şi de exploatare.
Indicatorii energetici:
- randamentul conversiei electromagnetice: ηe=Wn/Wc;
- randamentul static: η=Pn/Pc;
- randamentul electromagnetic;
- randamentul SAE: ηSAE=ηDE*ηME*ηT*ηML;
- factorul de putere: cosφ=Pc/Sc;
Indicatorii tehnici: se utilizează la viteză:
- gama reglării: R=vmax/vmin=Ωmax/Ωmin;
- fineţea reglării: f=vk+1/vk=Ωk+1/Ωk (raport a 2 trepte de viteze alăturate);
- sistemul reglării se referă la valorile vitezei reglate în raport cu valoarea nominală;
- precizia reglării – raportul dintre valoarea maximă şi valoarea prescrisă: θ=vmax/v0;
- constanta reglării – raportul dintre eroarea maximă şi valoarea prescrisă: γ=Δvmax/v0;
- suprareglarea: σ=Δvimax/v0;
- durata proceselor tranzitorii determinată de constantele de timp: a. electromagnetică: T=L/R; b. mecanică: Tm=-JdΩ/dM; c. termică: Tθ=C/A.
Indici economici şi de exploatare se referă la gabaritul şi eficienţa SAE: la motoare: kg/kw sau N/m.
C1. III Cinematica SAE se ocupă cu studiul SA în mişcare fără să se ţină cont de inerţia SA. Studiul mişcării se face cu ajutorul diagramelor sau graficelor de mişcare. Diagrama de mişcare reprezintă modul de variaţie în timp a unui parametru cinematic al mişcării de-a lungul unui ciclu complet de funcţionare. Un ciclu complet de funcţionare cuprinde succesiunea de intervale de timp necesare pornirii funcţionării în regim staţionar la viteză constantă şi opririi unui sistem. Un grafic de mişcare simplificat este cel al vitezei unui mecanism de translaţie. Aceste grafice sunt utile pentru a stabili graficele de sarcină (modul de variaţie în timp a forţei, cuplului, puterii rezistente cerută de mecanismul de lucru). La rândul lor graficele de sarcină se folosesc pentru alegerea condiţionată a puterii motorului electric necesar. Adesea diagramele de mişcare se optimizează după diferite criterii. Stabilirea diagramelor de mişcare porneşte de la valori cunoscute ale curselor mecanismelor de lucru, vitezelor, acceleraţiilor şi utilizând în acelaşi timp relaţiile cunoscute din mecanica clasică.
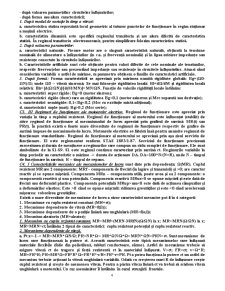
C2. I Optimizarea graficelor. Considerăm un grafic de viteză pentru un mecanism de translaţie, de formă trapezoidală având acceleraţiile egale la pornire şi oprire. Considerând constante cursa H a mecanismului de lucru şi acceleraţiile ne propunem să aflăm valoarea maximă a vitezei în regim staţionar astfel încât durata ciclului să fie minimă. H=h1+h2+h3=ct; tc=t1+t2+t3; a1=a2=a=ct; În acest caz dispare regimul staţionar. Un astfel de grafic de mişcare prezintă doar regim tranzitoriu de oprire şi pornire, în prima jumătate mecanismul lucrează accelerat, iar în a doua frânat cu aceeaşi acceleraţie. La mijlocul distanţei, şocul va fi foarte mare şi prin urmare insuportabil de către mecanismul de lucru. Dacă reprezentăm diferite grafice de mişcare având toate aceleaşi acceleraţii şi aceeaşi cursă H, vom constata că toate au vârful C pe o hiperbolă echilaterală: tc=H/vm; Vm=(0,3-0,7)vm0. În cazul graficelor de mişcare este criteriul optimizării. Ne propunem să eliminăm şocul modificând forma de variaţie în timp a vitezei. În cazul graficului trapezoidal din figură pe durata t11 viteza creşte parabolic, pe t12 creşte liniar, iar pe durata t13 creşte parabolic. Şocul variază după o lege rectangular alternativ în practică putând fi folosită şi variaţia alternativ sinusoidală a şocului.
C2. II Ecuaţia fundamentală a mişcării pentru sisteme rotative se obţine plecând de la teorema momentului cinetic pentru sistemul redus la un anumit arbore al său: Σ(pt j=1 la n) Mj=dk/dt; Suma vectorială a momentelor cuplurilor ce acţionează asupra sistemului este egală cu derivata momentului cinetic: k=JΩ. În cazul SAE se consideră 2 cupluri care sunt specifice celor 2 elemente: maşină electrică şi mecanism de lucru: M-MR=d/dt(JΩ), unde M – cuplu introdus de motor; MR – cuplu introdus de ML; M-MR=JdΩ/dt+ΩdJ/dt=JdΩ/dt+ΩdJ/dα*dα/dt;unde rezultă cea mai generală formă: M-MR=JdΩ/dt+Ω²dJ/dα(1*). Momentul de inerţie se consideră variabil cu poziţia unor elemente componente ale sistemului. Dacă sistemul este nedeformabil respectiv dacă dJ/dα=0 rezultă forma cea mai utilizată: M-MR=JdΩ/dt(2*), unde M – cuplu introdus la arbore de maşina electrică şi se consideră pozitiv M>0 dacă acţionează în sensul vitezei (dacă maşina funcţionează ca motor). M este negativ dacă acţionează în sens opus lui v (dacă maşina frânează mişcarea – funcţionează ca generator). MR – cuplu rezistent introdus la arbore de mecanismul de lucru. El este considerat >0 dacă se opune mişcării şi <0 dacă încearcă să accelereze mişcarea M-MR=Md=MJ=JdΩ/dt, unde Md – cuplu dinamic;
Preview document
















Conținut arhivă zip
- Actionari Electrice.doc
Alții au mai descărcat și

Memoriu justificativ În ultimii ani se tot încearcă o trecere de la sectorul energetic al lumii deja existent, în general dominat de monopoluri cu...

Capitolul 1 Generalităţi 1.1. Definiţii. Clasificări Funcţionarea normală şi corectă a oricărui aparat electronic necesită alimentarea acestuia...

Generalități; Determinarea puterii aparente; Alegerea numărului și a puterii posturilor de transformare; Amplasarea postului de transformare;...

ARGUMENT Maşinile electrice realizează transformarea energiei electrice in energie mecanica (motoare electrice sau electromotoare ), sau a...

1. ARGUMENT Tema acestui proiect se intitulează Instalaţii electrice interioare de iluminat şi este prezentată în 12 capitole dup cum urmează:...

1. MEMENTO Sa de realizeze un sistem de actionare pentru instalatia de ridicare coborare a unui echipament avand urmatoarele caracteristici:...

Proiectul de fata cuprinde documentatia tehnica cu privire la proiectarea instalatiilor electrice aferente unei gradinite avand regim S+P+2....

1.0 Clasificare Instalatiile electrice pentru iluminat dintr-o cladire se clasifica astfel: - instalatia electrica pentru iluminat normal, care...
Te-ar putea interesa și

CAPITOLUL I. CARACTERIZAREA GENERALĂ A ACŢIONĂRILOR ELECTRICE NAVALE 1.1. Sisteme de acţionare electrică a mecanismelor şi instalaţiilor de la...

REZUMAT Această lucrare prezintă câteva generalităţi privind sistemele de acţionari electrice, noţiuni legate de utilizarea maşinilor de curent...

Introducerea pe scara larga a automatizarii si robotizarii, realizarea noilor tipuri de masini unelte cu comanda program au condus la necesitatea...

Cap.I: Generalitati privind elementele sistemelor de actionari electrice I.1: Scurt istoric al actionarilor electrice Prima actionare electrica,...

Metode de control Acționările electrice cu MAS s-au impus în aplicații de două feluri [10] : - aplicații în care se dorește utilizarea optimă și...

1.Tema de proiectare: Sa se proiecteze sistemul de actionare electrica pe axa z a unui manipulator cartezian(fig.1) Date de proiectare: • Viteza...

Lucrarea se adreseaza cu precadere studentilor de la specializarea Electromecanica sau Electrotehnica, dar poate fi folosita si de studentii altor...

Definiţie, structura SAE Un SAE reprezintă un sistem de conversie a energiei electrice în energie mecanică care asigură controlul pe calea...