
Extras din curs
1. Ecuaţiile de funcţionare ale maşinilor de inducţie
1.1. Ecuaţiile în coordonatele fazelor (modelul în
coordonatele naturale)
Se consideră o maşină asincronă trifazată cu rotor bobinat la care atât statorul cât şi rotorul prezintă simetrie cilindrică (rotorul în colivie simetrică se poate reduce la o înfăşurare trifazată simetrică). În cadrul modelului în coordonatele fazelor (naturale) se vor utiliza indicii A, B, C pentru cele trei faze statorice şi a, b, c pentru fazele rotorice.
În figura 1 este reprezentat modelul în coordonatele fazelor al maşinii considerate. Axele de referinţă, statorică Rs şi rotorică Rr, s-au considerat suprapuse axelor fazelor, statorică A respectiv rotorică a. Rotorul are viteza unghiulară în termeni electrici . Poziţia sa este indicată de unghiul , măsurat între axele Rs şi Rr.
Fig. 1. Modelul fizic al unei maşini asincrone trifazate cu rotorul
bobinat.
Se adoptă ca ipoteze de lucru neglijarea saturaţiei şi a pierderilor în fier. Se consideră de asemenea că repartiţia câmpului magnetic de-a lungul întrefierului (constant) este sinusoidală. Respectând asocierea sensurilor pozitive corespunzătoare receptorului, ecuaţiile tensiunilor şi fluxurilor în valori momentane, se pot scrie sub formă matricială în felul următor:
, (1)
şi
, (2)
unde matricea tensiunilor şi matricea curenţilor au forma:
(3)
iar matricea rezistenţelor:
. (4)
Cu Ra s-a notat rezistenţa pe fază a înfăşurării statorice (s-a considerat RA = RB = RC) iar cu Ra , rezistenţa pe fază a înfăşurării rotorice (analog, Ra = Rb = Rc).
Inductivităţile reale care caracterizează modelul fizic al maşinii considerate sunt: inductivitatea totală proprie corespunzătoare unei faze statorice LAA, respectiv rotorice Laa ; inductivitatea mutuală între două faze statorice LAB, respectiv între două faze rotorice Lab ; inductivitatea mutuală înre o fază statorică şi una rotorică LAa.
Preview document













































































Conținut arhivă zip
- Contr Scalar.doc
- Control_vectorial.doc
- Controlul vectorial al ma_inilor de induc_ie trifazate.doc
- MAS_CONV.doc
Alții au mai descărcat și

Argument Reglarea automată este acel ansamblu de operaţii îndeplinit automat prin care o mărime fizică este menţinuta la o valoare prescrisă,...

Tema de proiect Să se proeicteze schema electrică de comandă, protecţie şi semnalizare a unui motor electric asincron, cu pornire stea-triunghi...

Introducere Ca disciplină tehnică electrotehnica este rezultatul dezvoltării ramurilor fizicii care se ocupă cu fenomenele electromagnetice. Ea...

PSPICE poate fi utilizat împreună cu Capture. Capture permite editarea grafică a schemei electrice utilizate, adică: Plasarea şi conectarea...

3.1 Materiale dielectrice După cum se ştie, pentru medii lineare, legea polarizaţiei electrice temporare se scrie sub forma unde este...

Generarea vectorilor si a matricelor uzuale Funcţiile folosite pentru generarea vectorilor si a matricelor uzuale sunt: zeros – generează...

Materiale necesare: - platforma nr. 16 (P 16); - două surse de tensiune stabilizată 15 Vc.c.; - două surse de tensiune stabilizată 5 Vc.c.; -...

Materiale necesare: - platforma de experimentare nr. 12 (P 12); - 2 surse de tensiune stabilizatã 24 V c.c.; - voltmetru de c.c. (multimetru...
Te-ar putea interesa și

Introducere Maşina de curent continuu este maşina electrică la care schimbul principal de energie cu o reţea se face în curent continuu. Se...

Una din preocuparile mondiale în domeniul actionărinor electrice este creșterea eficienței energetice. Cu ajutorul imaginației putem echivala...

1. Introducere Prezenţa energiei electrice este vitală în societatea modernă actuală. Această energie produsă, este repartizată către...

Capitolul 1 Introducere în sisteme eoliene 1.1.Istoric Vântul este rezultatul activităţii energetice a Soarelui şi se formează datorită...

Istorie Intre 1920-1923 s-a construit fabrica de locomotive a societatii “ Uzinele de Fier si Domeniile din Resita”.La aceasta fabrica s-au...

Motto: “Cum arată şcoala astăzi, aşa va arăta ţara mâine” Introducere Aderarea României la Uniunea Europeană constituie o prioritate politică...

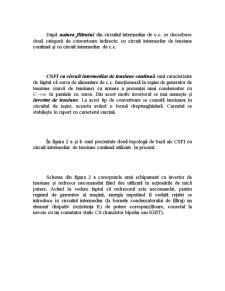
Variatoare de tensiune continua pentru comanda motoarelor electrice de curent continuu 4. Principii constructive si functionale. Clasificare...

Metode de control Acționările electrice cu MAS s-au impus în aplicații de două feluri [10] : - aplicații în care se dorește utilizarea optimă și...