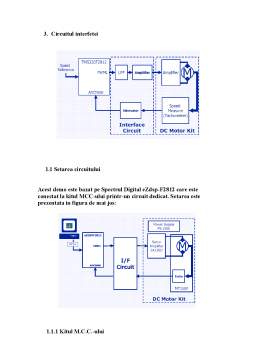
Extras din curs
1. Introducere
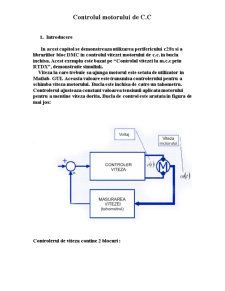
In acest capitol se demonstreaza utilizarea perifericului c28x si a librariilor bloc DMC in controlul vitezei motorului de c.c. in bucla inchisa. Acest exemplu este bazat pe “Controlul vitezei la m.c.c prin RTDX”, demonstratie simulink.
Viteza la care trebuie sa ajunga motorul este setata de utilizator in Matlab- GUI. Aceasta valoare este transmisa controlerului pentru a schimba viteza motorului. Bucla este inchisa de catre un tahometru. Controlerul ajusteaza constant valoarea tensiunii aplicata motorului pentru a mentine viteza dorita. Bucla de control este aratata in figura de mai jos:
Controlerul de viteza contine 2 blocuri :
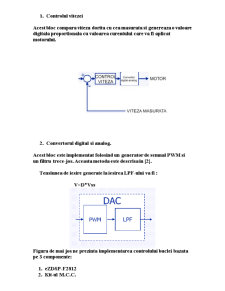
1. Controlul vitezei
Acest bloc compara viteza dorita cu cea masurata si genereaza o valoare digitala proportionala cu valoarea curentului care va fi aplicat motorului.
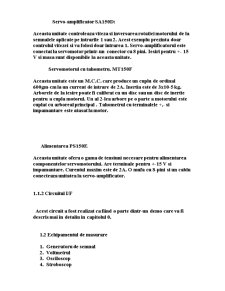
2. Convertorul digital si analog.
Acest bloc este implementat folosind un generator de semnal PWM si un filtru trece-jos. Aceasta metoda este descrisa in [2].
Tensiunea de iesire generate la iesirea LPF-ului va fi :
V=D*Vss
Figura de mai jos ne prezinta implementarea controlului buclei bazata pe 3 componente:
1. eZDSP-F2812
2. Kit-ul M.C.C.
Preview document















Conținut arhivă zip
- Controlul Motorului de Curent Continuu.doc
Alții au mai descărcat și

Memoriu Justificativ Motoarele sincrone cu magneți permanenți au o aplicabilitate în creştere datorită avantajelor sale, precum randamente...

ARGUMENT Lucrarea de faţa reprezintă „lucrarea de diplomă” pentru şcoala postliceală cu profil mecanic de Tehnician Tehnolog Mecanic. Dezvoltarea...

Capitolul 1 Generalităţi 1.1. Definiţii. Clasificări Funcţionarea normală şi corectă a oricărui aparat electronic necesită alimentarea acestuia...

Introducere Creşterea economică, caracteristică civilizaţiei industriale se bazează pe resurse neregenerabile (petrol, cărbuni, gaze naturale). În...

Casa Pasiva Sigla casa pasiva „ Locuinţa cu un consum redus de energie poate fi o soluţie de combatere a încălzirii globale. ” I. Casa Pasiva...

Cap. 1 MEMORIU JUSTIFICATIV Spre deosebire de motorul asincron, motorul sincron necesita o sursa de curent continuu pentru producerea curentului...

Tema proiectului Sa se proiecteze un vehicul hibrid, care are urmatoarele date: - Puterea nominal: Pn=60[kW]; - Autonomia de mers:L=75[km]; -...

TEMA DE PROIECT. Sa se proiecteze alimentarea unei masini de curent continuu cu excitatie separata care lucreaza in 4 cadrane, avand in: -indus:...
Te-ar putea interesa și

CAPITOLUL 1 Sisteme de reglare pentru acţionări electrice 1.1 Sisteme cu buclă deschisă şi bucla închisă Sistemele de control, în general, pot...
Introducere Creşterea economică, caracteristică civilizaţiei industriale se bazează pe resurse neregenerabile (petrol, cărbuni, gaze naturale). În...

Capitolu I.Introducere De la vechii greci ne-a rămas minunata legendă despre titanul Prometeu, care a răpit cerurilor focul şi l-a adus oamenilor....

Introducere Proiectul isi propune realizarea unui sistem electronic cu functia de monitorizare a unui perimetru importiva efractiilor, de...

Introducere - Obiective Obiectivul acestui proiect este de a construi o maşină de gaurit automata controlata de un controler bazat pe FPGA, care...

Memoriu justificativ: Această lucrare se concentrează pe alimentarea de la panouri fotovoltaice a unui sistem de pompare al apei alcătuit dintr-un...

1 Introducere În această lucrare este prezentat un modul de locomoție pentru roboți autonomi în toate fazele de dezvoltare, de la identificarea...

1 Introducere Obiectivul acestei lucrări este studierea unui sistem de reglare automată după stare, aplicat în cadrul unui sistem de laborator,...