Cuprins
- Introducere pag. 2
- 2. Modelarea sistemului de suspensie activa pag. 3
- 2.1 Cerinte de proiectare pag. 3
- 3. Modelul matematic a sistemului de suspensie active pag. 4
- 4. Functiile de transfer a sistemului pag. 7
- 5. Reglarea dupa stare pag. 9
- 6. Sinteza regulator lead - lag utilizand locul radacinilor pag 12
- 7.Sinteza regulator pid utilizand locul radcinilor pag 15
- 8. Proiectarea unui regulator in discret pag 18
- 8.1 Proiectarea cu extrapolator de ordin 0 pag 19
- 8.2 Proiectarea cu extrapolator de ordin 1 pag 20
- 8.3 Proiecatare folosind metoda Tustin pag 21
- 9.Proiecatre LQR pag 23
- 10 Concluzii pag 25
- 11 Bibliografie pag26
Extras din proiect
CAP.1 Introducere
Performanta sistemului de suspensie a autovehiculului este considerata in mod obisnuit legata de capacitatea acestuia de a oferi o buna functionare pe strazi si un confort imbunatatit al pasagerului.
Sistemele de control pasiv ofera doar un compromis intre aceste doua criterii, in timp ce sistemele de control activ ale suspensiilor, au drept scop izolarea corpului masinii de vibratiile rotii induse de terenul accidentat.
Modelul sistemului cu suspensie se bazeaza pe o analiza riguroasa. Pentru suspensia vehicolului se utilizeaza tipuri diferite de arcuri, amortizoare in stransa legatura cu flexibilitatea constructiei in diferite directii. Toate acestea au fost dezvoltate de-a lungul ultimului secol, practic de la inceputul erei automobilului.
Tipurile cele mai obisnuite si mai simple de suspensie sunt cele pasive in ideea ce sursele externe de energie nu sunt necesare. Odata cu dezvoltarea electronicii, performantele au inceput sa creasca si sa fie vizibile.
Scopul acestei lucrari este de a prezenta o schema de control care sa imbogateasca performantele suspensiei.
Noua tehnologie ofera o solutie simpla si economica pentru reducerea ruliului la viraje imbunatatind atat controlul vehiculului cat si performantele acestuia, fara a diminua confortul, asa cum fac sistemele de suspensie conventionala. Aceasta se realizeaza prin asigurarea unui contact permanent intre pneu si drum, pe toate cele patru roti, indiferent de starea suprafetei de rulare.
Testarea sistemului de suspensie desfasurat atat pe sosele cat si pe drumuri accidentate a demonstrat o reducere a ruluilui cu 40% si marirea contactului rotilor cu drumul cu 60% in comparatie cu folosirea sistemelor de suspensie conventionale. Se imbunatateste asfel tractiunea, directia si manevrabilitatea vehiculului, marindu-se de asemenea stabilitatea la viraje.
CAP.2 Modelarea sistemului de suspensie activa
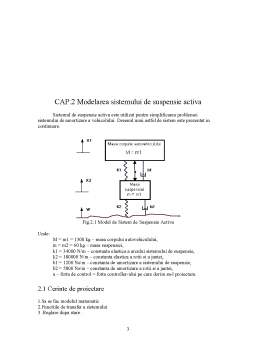
Sistemul de suspensie activa este utilizat pentru simplificarea problemei sistemului de amortizare a vehicolului. Desenul unui astfel de sistem este prezentat in continuare.
Fig.2.1 Model de Sistem de Suspensie Activa
Unde:
M = m1 = 1300 kg – masa corpului autovehiculului,
m = m2 = 60 kg – masa suspensiei,
k1 = 34000 N/m – constanta elastica a arcului sistemului de suspensie,
k2 = 180000 N/m – constanta elastica a rotii si a jantei,
b1 = 1200 Ns/m – constanta de amortizare a sistemului de suspensie,
b2 = 5800 Ns/m – constanta de amortizare a rotii si a jantei,
u – forta de control = forta controller-ului pe care dorim sa-l proiectam.
2.1 Cerinte de proiectare
1.Sa se fac modelul matematic
2.Functiile de transfer a sistemului
3 Reglare dupa stare
4.Proiectarea regulataorelor lead ,lag,lead-lag,pi,pd,pid.
5.Proiectarea unui regulator numeric prin metoda reproiectarii regulatorului dupa stare
6.Regulator LQR
CAP.3 Modelul matematic a sistemului de suspensie active
Reprezentarea in spatiul starilor este obtinuta din ecuatiile diferentiale ce caracterizeaza miscarea automobilului.
Ecuatiile dimamicii autovehiculului si a mesei suspensiei sunt:
Pentru a fi o reprezentare a spatiului starilor valabila, derivata tuturor starilor trebuie sa fie in termenul intrarilor si in starile insasi. Pentru inceput se impart prima si a doua ecuatie prin M, respectiv m.
Preview document


























Conținut arhivă zip
- Suspensii Active.doc
Alții au mai descărcat și

Suspensia activa este un tip de suspensie controlata extern de catre computerul de bord, care detecteaza miscarea automobilului prin senzori aflati...

1 . INTRODUCERE Piața de consum s-a adaptat cererii consumatorilor consumatorilor, indiferent dacă este pentru serviciile prestate sau pentru...

Modelarea suspensiei active a unui automobile este o problema de reglare interesanta.Cand sistemul de supensie este realizat ,modelul ¼ (o roata...

Tema proiectului Sa se determine functia de transfer a unui sistem dinamic liniar, dispunand de urmatoarea realizare: (t, u, ypert), unde:...

Tema proiectului Sa se determine functia de transfer a unui sistem dinamic liniar, dispunand de urmatoarea realizare: (t, u, ypert), unde:...

Cunoasterea duratei de timp de la semanat pâna la rasaritul plantelor mai are însemnatate si pentru obtinerea unor productii cat mai timpurii. Daca...

1. Introducere Automatica este ansamblul metodelor şi mijloacelor de realizare a unor legături (corelaţii) intre diferite elemente şi instalaţii...

In multe aplicatii este nevoie de un element care sa prezinte 2 stari diferite, cu posibilitatea de a trece dintr-o stare in cealalta, fara sau in...
Te-ar putea interesa și

Capitol 1 Introducere 1.1Motivaţie La nivel mondial există tendinţa de creştere a numărului de autovehicule aflate în exploatare cu implicaţie...
Suspensia activa este un tip de suspensie controlata extern de catre computerul de bord, care detecteaza miscarea automobilului prin senzori aflati...

1.Prezentarea generala a firmei de comisionar vamal Într-o lume care se îndreapta spre globalizare, schimbul de marfuri devine ratiunea de a...

Generalitati - Deplasarea automobilului pe drum este insotita de aparitia unor socuri si vibratii, precum si a unor oscilatii ale maselor...

1. Introducere: 1.1.Suspensia activă: Sistemul de suspensie activa are capacitatea de a-şi ajusta parametrii de funcţionare în mod continuu în...

MOTTO Docc"eFarmacia este nu numai o ştiinţă, ci este, de asemenea, o artă. Ea nu consistă din facerea de pilule şi plasturi, ea se ocupă cu...

Capitolul 1 Studiul solutiilor constructive posibile pentru puntea din fata si alegerea justficata a solutiei pentru puntea care se proiecteaza...

Introducere Deplasarea automobilului în orice regim, pe orice categorie de drum este însoţită de apariţia şocurilor şi vibraţiilor. De altfel,...