
Extras din proiect
1. Enunt
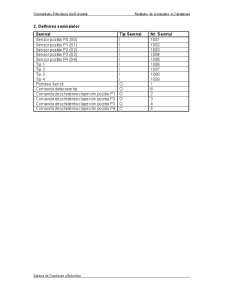
Se dau un robot si o banda transportoare pe care vin patru tipuri de piese. In pozitia P0 exista un senzor S0, care determina aparitia unei piese si o camera care determina tipul piesei. In pozitiile P1, P2, P3, P4 exista cate o clapeta, si cate un senzor asociat S1,&,S4. Daca intr-una dintre aceste pozitii exista o piesa iar clapeta este deschisa, atunci piesa cade intr-o pozitie bi, aflata la o distanta z de pozitia Pi corespunzatoare. Inaltimea unei piese este dz. Daca intr-unul din cele patru buffere aflate la pozitiile b1, b2, b3, b4 s-au acumulat patru piese de acelasi tip, atunci robotul opreste banda transportoare, preia cele patru piese si le depune in buffer-ul liniar corespunzator. Se cunosc pozitia f1 de start a primului buffer liniar si distantele dx si dy intre doua piese ale unui buffer liniar si respectiv, intre doua buffere liniare. Dupa ce a depus piesele, robotul se intoarce in pozitia de parcare generala G, reporneste banda transportoare si reia ciclul. Coordonatele World ale robotului sunt rotite astfel incat axa Yo si directia unui buffer liniar fac un unghi ±=45°.
Preview document





Conținut arhivă zip
- Sisteme de Conducere a Robotilor.doc
Alții au mai descărcat și

Rezultatele din testul 3DS Max 7 SPECapc Test Testul alaturat consta in crearea modelelor 3D, modificarea si randarea scripturilor. Conform...

Introducere O semnatura digitala reprezinta o informatie care il identifica pe expeditorul unui document. Semnatura digitala este creata prin...


Acest sistem calculeaza gradul de avariere a unei cladiri în cazul unui cutremur, precum si posibila necesitate a reconstructiei cladirii (partiala...
Te-ar putea interesa și

CAPITOLUL 1 Modelare si strategii de conducere a manipulatoarelor robotice 1.1. Introducere în problematica robotilor industriali Notiunea de...

1.Generalitati. Incercarile de obtinere a unor noi materiale superperformante au condus la dezvoltarea unei clase de produsi cunoscuti sub...

GENERALITĂŢI 1 MATERIALE CU MEMORIA FOMEI 2 MATERIALE INTELIGENTE 3 Materiale inteligente – DEFINITII, CONCEPTE 3 Materiale inteligente -...

1. ROBOTI INDUSTRIALI - INTRODUCERE Robotica este un domeniu al ştiinţei şi tehnicii relativ nou, cu o rapidă dezvoltare, legat de realizarea şi...

Rezumat Ȋn lucrarea de faţă este prezentat un robot industrial cu mişcări de rotaţie şi translaţie comandat de un controler logic programabil....

Introducere Dispozitivele de apucare (DA) reprezintă veriga finală din alcătuirea unui robot industrial, a manipulatoarelor şi a altor...

Enunt: Se considera montajul de mai jos: In linia de fabricatie prezentata mai sus sunt prelucrate trei tipuri de piese. Linia este formata din...

Legenda: PB – punct pe banda transportoare ce corespunde senzorului P2, si din care va fi preluata piesa PDB – punct deasupra benzii ; punct in...