
Extras din proiect
Capitolul 1 - Comanda PWM a invertoarelor de tensiune trifazate
În acest capitol se prezintă rolul comenzii cu modulaţie a pulsurilor în lăţime („Pulse Width Modulation” - PWM) şi se realizează clasificarea metodelor de modulaţie PWM. În conformitate cu scopul prezentei lucrări, analiza se axează în principal pe comanda invertoarelor de tensiune trifazate în punte.
1.1 Comanda invertoarelor de tensiune trifazate
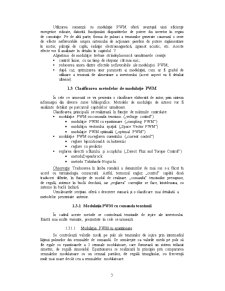
În acest capitol şi în cele următoare se va trata comanda invertoarelor trifazate de tensiune în punte, având schema din Fig. 1.1. Tranzistoarele din schemă pot fi bipolare, DMOS sau IGBT, simbolul utilizat fiind generic. În analiza care urmează toate dispozitivele de putere vor fi considerate ideale (cu timpi de comutaţie nuli, rezistenţă nulă în stare conductie şi rezistenţă infinită în stare de blocare). Funcţionarea acestui tip de invertor este descrisă detaliat în [Ng94].
Fig. 1.1 - Invertor de tensiune trifazat în punte
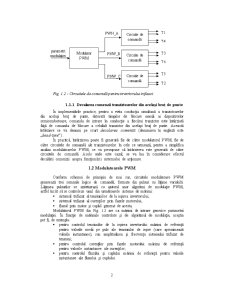
Pentru circuitelor de comandă a invertorului se va considera schema bloc de principiu din Fig. 1.2. Tranzistoarele de putere sunt comandate cu ajutorul unor circuite de comandă, care asigură parametrii necesari ai semnalelor de comandă şi, eventual, izolarea galvanică. Circuitele de comandă, la rândul lor, sunt comandate prin intermediul unor semnale logice, de către un modulator PWM. În principiu, acesta generează 3 semnale logice, fiecare acţionând complementar asupra celor două tranzistoare dintr-un braţ de punte.
În cele ce urmează, se va presupune următoarea logică de comandă:
- semnal HIGH: tranzistorul superior este comandat în conducţie şi cel inferior, în blocare; tensiunea de ieşire a fazei este ;
- semnal LOW: tranzistorul inferior este comandat în conducţie şi cel superior, în blocare; tensiunea de ieşire a fazei este .
Fig. 1.2 - Circuitele de comandă pentru invertorului trifazat
1.1.1 Decalarea comenzii tranzistoarelor din acelaşi braţ de punte
În implementările practice, pentru a evita conducţia simultană a tranzistoarelor din acelaşi braţ de punte, datorată timpilor de blocare nenuli ai dispozitivelor semiconductoare, comanda de intrare în conducţie a fiecărui tranzistor este întârziată faţă de comanda de blocare a celuilalt tranzistor din acelaşi braţ de punte. Această întârziere se va denumi pe scurt decalarea comenzii (denumirea în engleză este „dead-time”) .
În practică, întârzierea poate fi generată fie de către modulatorul PWM, fie de către circuitele de comandă ale tranzistoarelor. în cele ce urmează, pentru a simplifica analiza modulatoarelor PWM, se va presupune că întârzierea este generată de către circuitele de comandă. Acolo unde este cazul, se va lua în considerare efectul decalării comenzii asupra funcţionării sistemului de acţionare.
1.2 Modulatoarele PWM
Conform schemei de principiu de mai sus, circuitele modulatoare PWM generează trei semnale logice de comandă, formate din pulsuri cu lăţime variabilă. Lăţimea pulsurilor se sintetizează cu ajutorul unor algoritmi de modulaţie PWM, astfel încât să se controleze unul din următoarele sisteme de mărimi:
- sistemul trifazat al tensiunilor de la ieşirea invertorului;
- sistemul trifazat al curenţilor prin fazele motorului;
- fluxul prin motor şi cuplul generat de acesta.
Modulatorul PWM din Fig. 1.2 are ca mărimi de intrare generice parametrii modulaţiei. În funcţie de mărimile controlate şi de algoritmul de modulaţie, aceştia pot fi, de exemplu:
- pentru controlul tensiunilor de la ieşirea invertorului: mărimi de referinţă pentru valorile medii pe puls ale tensiunilor de ieşire (care aproximează valorile instantanee), sau amplitudinea şi frecvenţa sistemului trifazat de tensiuni;
- pentru controlul curenţilor prin fazele motorului: mărimi de referinţă pentru valorile instantanee ale curenţilor;
- pentru controlul fluxului şi cuplului: mărimi de referinţă pentru valorile instantanee ale fluxului şi cuplului.
Utilizarea comenzii cu modulaţie PWM oferă avantajul unei eficienţe energetice ridicate, datorită funcţionării dispozitivelor de putere din invertor în regim de comutaţie. Pe de altă parte, forma de pulsuri a tensiunilor generate cauzează o serie de efecte nefavorabile asupra sistemului de acţionare: pierderi de putere suplimentare în motor, pulsaţii de cuplu, radiaţie electromagnetică, zgomot acustic, etc. Aceste efecte vor fi analizate în detaliu în capitolul 7.
Algoritmii de modulaţie trebuie să îndeplinească următoarele cerinţe:
- control liniar, cu un timp de răspuns cât mai mic;
- reducerea unora dintre efectele nefavorabile ale modulaţiei PWM;
- după caz, optimizarea unor parametri ai modulaţiei, cum ar fi gradul de utilizare a tensiunii de alimentare a invertorului (acest aspect va fi detaliat ulterior).
1.3 Clasificarea metodelor de modulaţie PWM
În cele ce urmează se va prezenta o clasificare elaborată de autor, prin sinteza informaţiei din diverse surse bibliografice. Metodele de modulaţie de interes vor fi analizate detaliat pe parcursul capitolelor următoare.
Clasificarea principală se realizează în funcţie de mărimile controlate:
- modulaţie PWM cu comanda tensiunii („voltage control”)
- modulaţie PWM cu eşantionare („sampling PWM”)
- modulaţia vectorului spaţial („Space Vector PWM”)
- modulaţie PWM optimală („optimal PWM”)
- modulaţie PWM cu reglarea curentului („current control”)
- reglare bipozitională cu histerezis
- reglare cu predictie
- reglarea directă a fluxului şi a cuplului („Direct Flux and Torque Control”)
- metodaDepenbrock
- metoda Takahashi-Noguchi.
Observaţie: Traducerea în limba română a denumirilor de mai sus s-a făcut în acord cu terminologia consacrată. Astfel, termenul englez „control” capătă două traduceri diferite, în funcţie de modul de realizare: „comanda” tensiunilor presupune, de regulă, sisteme în buclă deschisă, iar „reglarea” curenţilor se face, întotdeauna, cu sisteme în buclă închisă.
Următoarele secţiuni oferă o descriere sumară şi o clasificare mai detaliată a metodelor prezentate anterior.
Preview document




















































































































Conținut arhivă zip
- Comanda PWM a Invertoarelor.doc
Alții au mai descărcat și

1.1. Scurtă istorie a utilizării energiei eoliene Posibilitatea folosirii forţei vântului a fascinat omenirea încă din cele mai vechi timpuri....

CAPITOLUL I INTRODUCERE I.1 GENERALITĂŢI Motoarele electrice sunt o componentă esenţială a societăţii actuale (puternic industrializată), cu nu...

MEMORIU JUSTIFICATIV Este greu de imaginat un domeniu în care să nu se ia în considerare energia sub diferite forme. Ea are un rol determinant în...

1. Notiuni introductive Schema de principiu a unui invertor trifazat de tensiune (Fig.1) este realizata dintr-o punte de elemente bidirectionale...

ARGUMENT Masurarile electrice si electronice, in contextul revolutiei stiintifice si tehnice din lumea contemporana, sunt indispensabile în toate...

INTRODUCERE Prin proiectul de faţă, s-a urmărit ca să se efectueze cât mai multe teste pentru a avea determinaţi parametrii, caracteristicile,...

Cap. 1 MEMORIU JUSTIFICATIV Spre deosebire de motorul asincron, motorul sincron necesita o sursa de curent continuu pentru producerea curentului...

1. INTRODUCERE 1.1. MEMORIU JUSTIFICATIV Majoritatea termocentralelor mari din tara noastra dateaza din perioada în care, dispersia gazelor de...
Te-ar putea interesa și

Folosirea unor dispozitive semiconductoare de putere din ce în ce mai performante (tranzistoare bipolare de putere, IGBT-uri, tranzistoare MOSFET...

GENERALITĂŢI În sectorul energetic din majoritatea statelor europene s-au produs transformări majore determinate de necesitatea creşterii...

Capitolul I STRUCTURA GENERALA A SISTEMULUI EOLIAN 1.1. Necesitatea sistemului Datorita epuizarii pe plan mondial a rezervelor de combustibili...

Introducere Tehnica de Modulaţie a Impulsurilor în Durată(MID) folosită în convertoarele de putere a fost propusă şi examinată de diferiţi...

Introducere Lucrarea de față își propune să prezinte principalele aspecte teoretice și practice în legătură cu convertoarele c.c. - c.a. Alegerea...

Invertoare 1.1. Introducere. Definiţii, clasificare şi mărimi caracteristice Invertoarele sunt convertoare statice ce transformă energia de...

1. Variatoare de tensiune continuă (VTC) Regimul CCM al VTC. Regimul DCM al VTC. 2 Variatoare de tensiune continuă (VTC) Convertoare BUCK cu...

PREZENT ŞI PERSPECTIVE ÎN ELECTRONICA DE PUTERE ii. TENDINŢE ÎN ELECTRONICA DE PUTERE iii. CONTROLUL DIGITAL IN ELECTRONICA DE PUTERE iv....