
Extras din proiect
Această lucrare descrie proiectarea şi punerea în aplicare de un controler digital convertor experimental de putere scazută dintr-un sistem de baterii cu putere de gestionare.S-au folosit mai multe moduri de operare pentru o largă gamă de tensiuni de intrare şi sarcini pentru a menține o eficienţă înaltă, printre care s-a propus şi s-a testat o estimare tehnică de curent care efectuează o performanţă dependentă de încarcarea unui convertor.
În lucrare este descrisă proiectarea unui regulator PID digital , cu accent pe limitările practice impuse de aritmetica unui punct fix şi întârzierea datorată prelevării de probe şi procesării.
I. INTRODUCERE
Era de aşteptat ca controlerurile digitale să le înlocuiască pe cele analogice predominante de frecvenţe înalte aplicate comutatorului de putere.
Avantajele potențiale ale punerii în aplicare ale controlerului digital include o flexibilitate îmbunătățită, timp de proiectare redus, programabilitate, eliminarea de componente discrete, sistem îmbunătățit fiabilitate, integrarea unui sistem mai uşor, performanţe diferite. Datorită progreselor din tehnologia DSP, cantitatea semnificativă de prelucrare este disponibilă chiar și la frecvențe relativ mari de comutare. Cu toate acestea, în afară de problemele de cost la controlerurile digitale mai sunt şi cele legate de rezoluția limitată de puls-lățime modulatoare, efectele de punct fix aritmetic, precum și întârzierile introduse de prelevarea de probe și de prelucrare.
În această lucrare, considerăm punerea în aplicare a unui controler digital pentru un convertor de putere mică într-o baterie - sistem de conducere energetic cu elevator. Este necesar să se mențină reglarea tensiunii puternice, precum și de înaltă eficiență pe o gamă largă de sarcini. Pentru a satisface aceste cerințe, precum și pentru a demonstra beneficiile potențiale ale unei implementări controler numeric, s-a folosit în această aplicație un convertor cu moduri de operare multiple.
II. TOPOLOGIA CONVERTORULUI ŞI MODURI DE OPERARE
Exemplul de aplicare considerat în această lucrare este un convertor DC-DC pentru un sistem de baterie cu putere de conducere. Tensiunea de intrare este în intervalul de la 2V la 5V (cum ar fi de la o singură celulă-Li-Ion). Tensiunea de ieşire este reglată strict la 3V. Sistemul are două moduri de funcționare: "Run" sau modul încărcături grele, atunci când curentul de sarcină este în intervalul 1-2A, şi "stand-by" sau mod lumină de sarcină atunci când curentul de sarcină este în 10-150mA gama. Este de dorit să se mențină reglarea tensiunii puternice, precum şi de înaltă eficiență, în moduri atât de sarcină grea cât şi uşoară
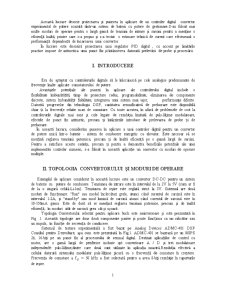
Topologia Convertorului selectat pentru aplicare buck este neinversoare şi este prezentată în Fig .1. Această topologie are doar două componente pasive şi poate funcționa ca un ridicător sau un impuls, în funcție de secvența de conducere.
Sistemul de testare experimentală a fost bazat pe Analog Devices ADMC-401 DSP Consiliul pentru Dezvoltare, aşa cum este prezentată în Fig.1. ADMC-401 se bazează pe un MIPS 26, 16-biţi pe un punct fix al procesorului de semnal digital. Destinat aplicațiilor de control cu motor, are o gamă largă de periferice inclusiv opt convertoare A / D şi trei modulatoare independente puls-lățime,dintre care două sunt utilizate în aplicația noastră.Rezoluția efectivă a ciclului datorată sistemului modulator puls-lățime picură cu o frecvență de comutare în creștere. Frecvența de comutare a f = 50 kHz a fost selectată pentru a avea 8-biţi rezoluţie în raporturile de ieşire.
Fig.1. Convertorul Buck-impuls de neinversare cu un controller digital
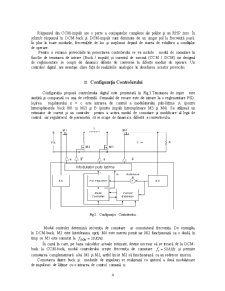
Fig.2. Eficenţa operării convertorului CCM la 50 KHz şi în DCM la 20 KHz
A. Moduri de operare
Atunci când tensiunea de intrare este mai mare decât producția, convertorul operează ca un convertor Buck : M3 este întotdeauna oprit, M4 este mereu pornit, M1 este comutat la frecventa constanta cu ciclu D iar M2 funcționează ca un redresor sincron.
Atunci când tensiunea de intrare este mai mică decât producția, convertorul este opereaza ca un impuls: M1 este întotdeauna pornit, M2 este întotdeauna oprit, M3 este pornit periodic cu D ciclu iar M4 lucrează ca un redresor sincron. Este interesant de comparat convertorul din Fig.1 cu unul convențional cu două comutatoare buck-impuls.
Pierderile tranzistoarelor de conducere sunt comparabile, chiar dacă buck-impulsurile ne-inversoare au două dispozitive active care conduc curentul inductor în fiecare subinterval de comutare. Volt secundele aplicate inductorului şi curentului inductorului RMS sunt semnificativ mai mici în sectorul non-inversor buck-impuls convertor din Fig. 1 atunci când operează în buck sau în modul de impuls. De aceea, un inductor mai mic poate fi utilizat în detrimentul mai multor dispozitive active şi a unor controlere mai complicate.
Atunci când sarcina este grea, convertorul este proiectat să funcționeze în modul de conducție continuu (CCM) la constanta de comutare a frecvenței f = 50kHz.
Eficiența experimentală măsurată în funcție de curentul de sarcină este indicată în Fig. 2.Randamentul este ridicat la sarcină grea, dar se reduce la valori de sarcină uşoară.
Acest lucru se datorează faptului că pierderile de lumină de încărcare sunt dominate de pierderile de comutare, care sunt în esență independente de curentul de sarcină. Eficiența sarcinei de lumină poate fi îmbunătățită în mod semnificativ prin operarea convertorului în modul de conducție discontinuă precum şi prin reducerea frecvenței de comutare [1]. Fig. 2 prezintă de asemenea eficiența măsurată când convertorul operează în DCM cu o frecvență de comutare redusă f = 20KHz.Randament curbelor pentru cele două moduri se intersectează în curentul de sarcină de aproximativ 150mA.
Pe baza rezultatelor din fig. 2, aplicaţia s-a efectuat în funcție de modul în care comutatorul depinde de curentul de sarcină: în modul de sarcini grele convertorul operează la frecvență înaltă în CCM iar în modul de lumină de sarcină convertorul operează la frecvență redusă în DCM. Frecvența constantă a raportului responsabil de control sunt utilizate pentru reglementarea tensiunii de ieşire în ambele moduri.
Preview document










Conținut arhivă zip
- Controllerul Digital PWM si Curentul Estimat pentru un Converter de Comutatie de Putere Scazuta pe Avioane.doc
Alții au mai descărcat și

Cap 1. Introducere Each year there are a number of aircraft accidents related to weight and balance issues. Such accidents have occurred due to...

Standardele ISO 14000 sunt standarde generale referitoare la sistemele de management de mediu destinate pentru tinerea sub control a impactului...

Elementele pneumatice de excutie (motoarele pneumatice) transforma energia aerului comprimat in lucru mecanic. Motoarele pneumatice pot fi: • cu...

Filtrele sunt circuite electronice care efectueaza funcţii de prelucrarea semnalelor, special destinate pentru a elimina componentele de semnal...

CURS 1 MODELAREA MATEMATICĂ A SISTEMELOR Sistemele mecatronice sunt structuri complexe formate din componente mecanice, electronice şi elemente de...

ASAMBLĂRI PRIN ȘURUBURI. Asamblarea cu șuruburi este una din cele mai vechi metode de asamblare utilizată în construcția de mașini. Aproape că nu...

CONVENȚII INTERNAȚIONALE ÎN DOMENIUL SECURITĂȚII - Convenția de la Chicago din 1944 - Convenția de la Tokyo din 1963 - Convenția de la Haga din...

INTRODUCERE Avionica (AVIation electrONICS - avionics) este termenul prin care, începând din perioada anilor 1930, sunt reunite echipamentele care...