Extras din proiect
Introducere
O trasatura caracteristica a dezvoltarii constructiilor de aparate de zbor o constitue automatizarea partiala sau totala a conducerii zborului.
In perioada initiata a dezvoltarii constructiilor de avioane, singurul mijloc de conducere a zborului il constituia comanda manuala (pilotarea) a acestuia. In prezent, multe din functiunile legate de conducerea zborului avionului sunt asigurate de instalatii automate care ating astazi un inalt grad de complexitate structurala. Tinand seama de aceasta tendinta de dezvoltare, comanda avionului in intregime continua sa ramana sub controlul pilotului om.
Pilotul automat este, in esenta, un echipament obligatoriu la bordul avioanelor moderne. Prezenta lui este pe deplin justificata. Avem in vedere in acest sens, ca volumul mare de informatii vehiculat la bord si variatia lui rapida depaseste posibilitatea fiziologica de sintetizare si decizie ai pilotului uman.
Aparatelor de zbor moderne li se impun astazi caracteristici de zbor superioare (viteza,altitudine) care conduc la forme si structuri de aparate care privite ca obiecte de comanda, se gasesc la limita domeniului de stabilitate. Din acest motiv, automatele de conducere a zborului sau pilotii automati au un rol insemnat in interactiunea dintre om si automat (pilot automat), pilotul automat fiind acela care asigura calitatile necesare sistemului de comanda automata a zborului, si faciliteaza zborul in conditii de stabilitate si fiabilitate.
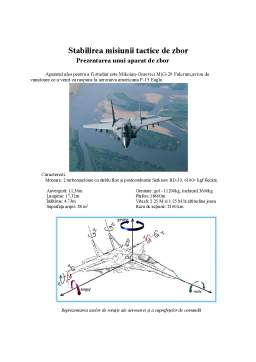
Miscarea aparatului de zbor considerat corp rigid este descrisa de ecuatiile generale de miscare ale lui Euler. Pentru comanda miscarilor de rotatie- care determina atitudinea (tinuta) aparatului de zbor- si a miscarilor de translatie, trebuie create forte si momente de comanda in raport cu gradele de libertate ale aparatului de zbor.
In general variatia acestor forte si momente se realizeaza de catre suprafetele (organele) de comanda ale aparatului de zbor fie manual – pilotarea manuala – fie automat, prin intermediul sistemului de comanda automata – pilot automat.
Fig.1.1.-Schema generala de comanda a aparatului de zbor
D.M.- dispozitiv de masurare;
D.C.- dispozitiv de calcul (realizeaza legea de comanda);
D.E.- dispozitiv de executie (servomotor, servomecanism);
I.C.- indicator de comanda;
I.V.- informatii vizuale;
P.A.N.- pilotarea dupa aparate de navigatie.
In functie de regimul de zbor comandat, pilotul automat poate avea unul sau mai multe circuite (canale) de reglare automata care pot fi autonome sau cu legaturi inter canale stabilite de legea de conducere (reglare).
Proprietatile dinamice ale aparatelor (stabilitatea, amortizarea miscarilor) nu sunt intotdeauna satisfacatoare, iar incercarile de a le imbunatatii prin modificari constructive, duc la inrautatirea formelor aerodinamice. Din acest motiv se poate pune problema obtinerii unor procese dinamice de calitate cu asigurarea stabilitatii aparatelor de zbor prin folosirea sistemelor automate de comanda, fara a inrautatii caracteristicile lor aerodinamice.
Aceste sisteme, trebuie sa limiteze influenta perturbatiilor exterioare, care in situatia aparatului de zbor fara pilot automat, fortele si momentele perturbatoare pot provoca suprasarcini daunatoare, incalziri nedorite.
O alta particularitate caracteristica aparatelor de zbor modern este gama mare a vitezei si inaltimii de zbor care determina modificari esentiale ale caracteristicilor dinamice. De asemenea parametrii dinamici se modifca si in urma variatiei masei aparatului de zbor si a momentelor de inertie. In diferite conditii de zbor si pentru diverse regimuri de zbor sunt necesare actiuni de comanda diferite. Pentru a obtine calitatea dorita a procesului tranzitoriu trebuie ca acesti parametrii sa se modifice corespunzator cu variatia conditiilor exterioare. Sistemul de comanda automata trebuie sa se adapteze la conditiile de zbor adica sa fie autoadaptiv.
Sistemele automate de comanda a coordonatelor de miscare ale aparatului de zbor, fiind multicanale, cu legaturi intre canale pot fi tratate ca sisteme automate multidimensionale.
Conducerea automata a zborului aeronavelor se realizeaza prin comanda parametrilor regimului de zbor cum sunt coordonatele unghiulare si liniare, vitezele si acceleratiile, coordonatele si acceleratiile care caracterizeaza miscarea aparatului de zbor in raport cu alte aparate din formatie sau in raport cu tinta.
La comanda aeronavelor, trebuie sa se asigure calitatea dorita a procesului tranzitoriu, precizia de executie a comenzilor, reactia slaba la actiunea perturbatiilor exterioare, caracterul optimal al miscarii.
Preview document



































Conținut arhivă zip
- Pilot Automat cu Reactie de Viteza (Astatic) pentru Unghiul de Tangaj.docx
Alții au mai descărcat și

Standardele ISO 14000 sunt standarde generale referitoare la sistemele de management de mediu destinate pentru tinerea sub control a impactului...

Elementele pneumatice de excutie (motoarele pneumatice) transforma energia aerului comprimat in lucru mecanic. Motoarele pneumatice pot fi: • cu...

Filtrele sunt circuite electronice care efectueaza funcţii de prelucrarea semnalelor, special destinate pentru a elimina componentele de semnal...

CURS 1 MODELAREA MATEMATICĂ A SISTEMELOR Sistemele mecatronice sunt structuri complexe formate din componente mecanice, electronice şi elemente de...

ASAMBLĂRI PRIN ȘURUBURI. Asamblarea cu șuruburi este una din cele mai vechi metode de asamblare utilizată în construcția de mașini. Aproape că nu...

CONVENȚII INTERNAȚIONALE ÎN DOMENIUL SECURITĂȚII - Convenția de la Chicago din 1944 - Convenția de la Tokyo din 1963 - Convenția de la Haga din...

INTRODUCERE Avionica (AVIation electrONICS - avionics) este termenul prin care, începând din perioada anilor 1930, sunt reunite echipamentele care...

I. ELEMENTE GENERALE 1.1. Instalatiile energetice ale avioanelor Avioanele moderne si tehnica aerospațială utilizează pe scară largă dispozitive...