Extras din proiect
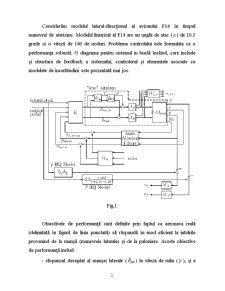
Consideram modelul lateral-directional al avionului F14 în timpul manevrei de aterizare. Modelul liniarizat al F14 are un unghi de atac ( ) de 10.5 grade si o viteza de 140 de noduri. Problema controlului este formulata ca o performanta robusta. O diagrama pentru sistemul in bucla închisa, care include si structura de feedback a sistemului, controlerul si elementele asociate cu modelele de incertitudini este prezentata mai jos.
Fig.1
Obiectivele de performanta sunt definite prin faptul ca aeronava reala (delimitata în figura de linia punctata) sa raspunda în mod eficient la intrarile provenind de la mansa (manevrele laterale) si de la paloniere. Aceste obiective de performanta includ:
- raspunsul decuplat al mansei laterale ( ) la viteza de ruliu ( ), si a palonierelor ( ) la unghiul de alunecare ( ). Palonierele si mansa laterala au sageata maxima de ±1 inch. Prin urmare ele sunt reprezentate ca semnale neponderate în Fig. 1.
Raspunsul calitatilor de manevrabilitate (HQ = handling quality) de la mansa laterala la viteza de ruliu trebuie sa fie un sistem de ordinul întâi , iar cele de la paloniere la unghiul de aluncare va fi .
Actuatorul stabilizatorului (ampenajului orizontal fix) are sageata de ±20 grade si este limitata la ±90 grade/sec. Actuatorul directiei are sageata de ±30 grade si este limitat la ±125 grade/sec.
- 3 semnale masurate, vitezele de ruliu si giratie si acceleratia laterala sunt trecute printr-un filtru anti-aliasing de gradul 2, înainte de a introduce semnalul în controler. Filtrul anti-aliasing este urmatorul .
Modelul nominal si modelul incertitudinilor
Pilotul are capacitatea de a comanda raspunsul lateral-directional al avionului cu mansa laterala ( ) si cu palonierele ( ). Avionul are 2 intrari pentru control: bracarea diferentiata a stabilizatorului ( ) si bracarea cârmei ( ); 3 iesiri masurate: viteza de ruliu ( ), viteza de giratie ( ) si acceleratia laterala ( ) si o iesire calculata, unghiul de alunecare ( ). nu este o variabila masurata dar este folosita ca un criteriu de performanta. Modelul lateral-directional F-14 (F14nom) are 4 stari: viteza laterala ( ), viteza de giratie ( ), viteza de ruliu ( ) si unghiul de ruliu ( ). Aceste variabile se regasesc în ecuatiile de stare.
Preview document
















Conținut arhivă zip
- RTO - Proiectarea Controlerului Lateral - Directional Pentru F-14.doc
Alții au mai descărcat și

Standardele ISO 14000 sunt standarde generale referitoare la sistemele de management de mediu destinate pentru tinerea sub control a impactului...

Elementele pneumatice de excutie (motoarele pneumatice) transforma energia aerului comprimat in lucru mecanic. Motoarele pneumatice pot fi: • cu...

Filtrele sunt circuite electronice care efectueaza funcţii de prelucrarea semnalelor, special destinate pentru a elimina componentele de semnal...

CURS 1 MODELAREA MATEMATICĂ A SISTEMELOR Sistemele mecatronice sunt structuri complexe formate din componente mecanice, electronice şi elemente de...

ASAMBLĂRI PRIN ȘURUBURI. Asamblarea cu șuruburi este una din cele mai vechi metode de asamblare utilizată în construcția de mașini. Aproape că nu...

CONVENȚII INTERNAȚIONALE ÎN DOMENIUL SECURITĂȚII - Convenția de la Chicago din 1944 - Convenția de la Tokyo din 1963 - Convenția de la Haga din...

INTRODUCERE Avionica (AVIation electrONICS - avionics) este termenul prin care, începând din perioada anilor 1930, sunt reunite echipamentele care...

I. ELEMENTE GENERALE 1.1. Instalatiile energetice ale avioanelor Avioanele moderne si tehnica aerospațială utilizează pe scară largă dispozitive...