Cuprins
- CAPITOLUL1: Scurta introducere
- CAPITOLUL2: Stabilirea schemei cinematice
- CAPITOLUL3: Calculul reductorului
- CAPITOLUL4: Calculul puterii motorului
- CAPITOLUL5: Verificarea la incalzire a motorului
- CAPITOLUL6: Studiul regimurilor dinamice
- CAPITOLUL7: Stabilirea graficului de sarcina
- CAPITOLUL8: Elaborarea schemei de comanda si semnalizare
- CAPITOLUL9: Calculul feederului de alimentare
Extras din proiect
Date de proiectare:
Unghi de bracaj : 15° - la decolare.
45° - la aterizare.
Viteza maxima la aterizare/decolare: 220/180 km/h.
Timp de escamontare/scoatere: 3/5 secunde.
Suprafata flaps: 16 m2
CAPITOLUL 1
SCURTA INTRODUCERE
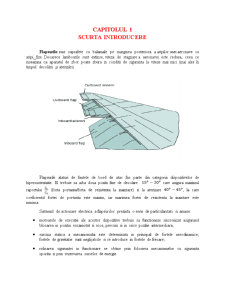
Flapsurile sunt suprafete cu balamale pe marginea posteriora a aripilor unei aeronave cu aripi fixe. Deoarece lambourile sunt extinse, viteza de stagnare a aeronavei este redusa, ceea ce inseamna ca aparatul de zbor poate zbura in conditii de siguranta la viteze mai mici (mai ales în timpul decolării şi aterizării.
Flapsurile alaturi de fantele de bord de atac fac parte din categoria dispozitivelor de hipersustentatie. El trebuie sa aiba doua pozitii fixe de decolare care asigura maximul raportului (forta portanta/forta de rezistenta la inaintare) si la aterizare , la care coeficientul fortei de portanta este maxim, iar marimea fortei de rezistenta la inaintare este minima.
Sistemul de actionare electrica a flapsurilor prezinta o serie de particularitati si anume:
• motoarele de executie ale acestor dispozitive trebuie sa functioneze sincronizat asigurand blocarea in pozitia escamotat si scos, precum si in orice pozitie intermediara;
• sarcina statica a mecanismului este determinata in principal de fortele aerodinamice; fortele de gravitatie sunt neglijabile si se introduce in fortele de frecare;
• ridicarea sigurantei in functionare se obtine prin folosirea mecanismelor cu siguranta sporita si prin rezervarea surselor de energie.
CAPITOLUL 2
STABILIREA SCHEMEI CINEMATICE
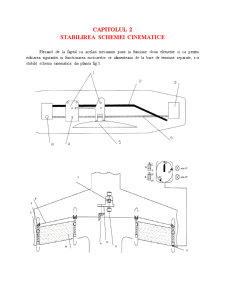
Plecand de la faptul ca acelasi mecanism pune in funciune doua elemente si ca pentru ridicarea sigurantei in functionarea motoarelor se alimenteaza de la bare de tensiune separate, s-a stabilit schema cinematica din plansa fig.1.
1 - caruciorul flapsului
2 - culisa
3 - lagarul surubului
4 - piulita captiva
5 - sectiunea flapsului
6 - surub conducator
7 - diferential
8 - arbore transversal
9 - argrenaj conic
10 - flaps
11 - transmitator unghiular
12 - argrenaj cilindric
13 - motor electric
Cele doua motoare 13, actioneaza diferential 7, care indiferent daca unul din motoare cedeaza isi continua miscarea de rotatie cu dublarea corespunzatoare a timpului de actionare.
Diferentialul transmite miscarea prin angrenajul cilindric 12 care reduce turatia de la n1=5000 rot/min la n2=4000 rot/min.
Pe axul rotii distantate condusa este fixata roata conducatoare conica care odata cu schimbarea directiei cu asigura o reducere a turatiei de la n1=4000rot/min la n2=800rot/min.
De la roata condusa a angrenajului conic miscarea de rotatie este transmisa la cele doua flapsuri astfel: rotatia este transmisa prin sistemul de roti conice 9, surubului conducator 6 care fiind fixat de celalalt capat intr-un lagar, face o piulita captiva 4 sa execute o miscare de translatie (aceasta este defapt o transmisie elicoidala).
De piulita captiva 4, este fixat rigid flapsul. Pentru a realiza si bracarea lui, caruciorul flapsului, exista in prima parte o miscare de translatie in sens invers directiei de zbor pentru ca mai apoi culisa 2, sa aiba o portiune curbata ceea ce face ca in functie de pozitia flapsului in zona de curbura, acesta sa fie bracat la sau .
Arborele transversal 8, asigura transmiterea miscarii si spre celalalt punct de sprijin al flapsului situat spre extremitatea surubului conducator cu numarul de dinti astfel calculat incat raportul de transmisie sa fie unitar. Lagarul de la cealalta extremitate a surubului 6, este fixat solidar de structura aripii.
Se observa ca pe unul din aceste lagare este fixat un transmitator unghiular 11, necesar informarii pilotilor asupra pozitiei flapsurilor.
La defectarea unui motor actionarea ramane viabila, dublandu-se doar timpul de executie.
CAPITOLUL 3
CALCULUL REDUCTORULUI
Pentru a putea calcula reductorul, in principal rapoartele de transmisie si numarul de dinti ai rotilor dintate s-a plecat in sens invers pentru a se incadra in timpul impud prin tema de proiect.
Preview document


















Conținut arhivă zip
- Sa se Proiecteze Sistemul de Actionare Electrica a Flapsurilor pentru un Avion de Transport.doc
Alții au mai descărcat și

Standardele ISO 14000 sunt standarde generale referitoare la sistemele de management de mediu destinate pentru tinerea sub control a impactului...

Elementele pneumatice de excutie (motoarele pneumatice) transforma energia aerului comprimat in lucru mecanic. Motoarele pneumatice pot fi: • cu...

Filtrele sunt circuite electronice care efectueaza funcţii de prelucrarea semnalelor, special destinate pentru a elimina componentele de semnal...

CURS 1 MODELAREA MATEMATICĂ A SISTEMELOR Sistemele mecatronice sunt structuri complexe formate din componente mecanice, electronice şi elemente de...

ASAMBLĂRI PRIN ȘURUBURI. Asamblarea cu șuruburi este una din cele mai vechi metode de asamblare utilizată în construcția de mașini. Aproape că nu...

CONVENȚII INTERNAȚIONALE ÎN DOMENIUL SECURITĂȚII - Convenția de la Chicago din 1944 - Convenția de la Tokyo din 1963 - Convenția de la Haga din...

INTRODUCERE Avionica (AVIation electrONICS - avionics) este termenul prin care, începând din perioada anilor 1930, sunt reunite echipamentele care...

I. ELEMENTE GENERALE 1.1. Instalatiile energetice ale avioanelor Avioanele moderne si tehnica aerospațială utilizează pe scară largă dispozitive...
Te-ar putea interesa și

Fabricatie.Exploatare.Dezvoltare.Perspective. Boeing 767 este un avion american bimotor de transport cargo si pasageri, mediu si lung-curier...

Boeing 747 este un avion american de pasageri cvadrimotor lung și foarte lung curier de mare și foarte mare capacitate produs de firma Boeing. Este...