Cuprins
- 1.Introducere
- 2.Stabilirea schemei cinematice
- 3.Calculul reductorului
- 4.Calculul puterii motorului si alegerea lui
- 5.Verificarea la incalzire a motorului
- 6.Studiul regimurilor dinamice
- 7.Elaborarea schemei de comanda
- 8.Calculul feederului de alimentare
- 9.Concluzii
- 10. Bibliografie
Extras din proiect
1.INTRODUCERE
La orice aparat de zbor , se urmareste prin toate mijloacele , o micsorare cat mai mare a rezistentei la inaintare , adica mentinerea finetei aerodinamice de valoare cat mai ridicata . Exista insa cazuri si situatii contrare cand , pentru scurt timp , se urmareste o franare aerodinamica suplimentara , nu numai pe timpul rulajului pe sol , la aterizare , ci chiar si in timpul zborului . Asemenea situatii pot aparea de exemplu :
- In zborul planat dinaintea aterizarii pentru a accentua panta , usurand astfel prinderea capatului pistei , imbunatatind vizibilitatea ;
- In timpul picajului , in special daca acesta se executa la unghiuri mari ;
- In zbor in formatie , pentru manevre rapide in interiorul acestora ;
- In avioanele militare , pentru reducerea rapida a vitezei si mentinerea unei pozitii favorabile in lupta (frane tactice) ;
In asemenea scopuri pot fi folosite diferite tipuri de frane aerodinamice .
De observat ca unele din avioanele existente nu dispun de frane aerodinamice ca organe distincte , franarea aerodinamica putandu-se obtine si prin alte mijloace (elice cu pas inversat , deviatoare de jet , etc ), in timp ce planoarele de performanta , caracterizate prin finete aerodinamica mult mai ridicata decat avioanele , sunt prevazute intotdeauna cu astfel de frane.
2.STABILIREA SCHEMEI CINEMATICE
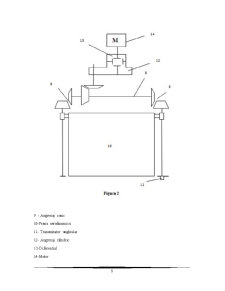
Plecand de la faptul ca acest mecanism pune in functiune un singur element si ca pentru ridicarea sigurantei in functionarea motorului se alimenteaza de la bara de tensiune separata , s-a stabilit schema cinematica din figura 2 .
Motorul 14 actioneaza diferentialul 13 . Diferentialul transmite miscarea prin angrenajul cilindric 12 , care reduce turatia de la n=5000 rot/min la n1=4000 rot/min.
Pe axul rotii dintate conduse este fixata roata conducatoare conica care odata cu schimbarea directiei cu 90o asigura o reducere a turatiei n1=4000 rot/min la n2=800 rot/min .
De piulita captiva 3 este fixat prin intermediul unei tije 2 , cu articulatii la ambele capete 1 , placa franei aerodinamice 6 . Pentru a realiza bracarea exista o miscare de translatie, in sensul directiei de zbor .
Arborele transversal 8 asigura transmiterea miscarii spre punctul de sprijin al franei situat spre extremitatea surubului conducator cu numarul de dinti astfel calculat incat raportul de transmisie sa fie unitar . Lagarul de la cealalta extremitate a surubului este fixat solid in structura aeronavei .
Se observa ca pe unul din aceste lagare este fixat un transmitator unghiular necesar informarii pilotului asupra pozitiei franei .
Preview document















Conținut arhivă zip
- Sistemul de Actionare Electrica a Franelor Aerodinamice pentru un Avion Turboreactor.docx
Alții au mai descărcat și

Standardele ISO 14000 sunt standarde generale referitoare la sistemele de management de mediu destinate pentru tinerea sub control a impactului...

Elementele pneumatice de excutie (motoarele pneumatice) transforma energia aerului comprimat in lucru mecanic. Motoarele pneumatice pot fi: • cu...

Filtrele sunt circuite electronice care efectueaza funcţii de prelucrarea semnalelor, special destinate pentru a elimina componentele de semnal...

CURS 1 MODELAREA MATEMATICĂ A SISTEMELOR Sistemele mecatronice sunt structuri complexe formate din componente mecanice, electronice şi elemente de...

ASAMBLĂRI PRIN ȘURUBURI. Asamblarea cu șuruburi este una din cele mai vechi metode de asamblare utilizată în construcția de mașini. Aproape că nu...

CONVENȚII INTERNAȚIONALE ÎN DOMENIUL SECURITĂȚII - Convenția de la Chicago din 1944 - Convenția de la Tokyo din 1963 - Convenția de la Haga din...

INTRODUCERE Avionica (AVIation electrONICS - avionics) este termenul prin care, începând din perioada anilor 1930, sunt reunite echipamentele care...

I. ELEMENTE GENERALE 1.1. Instalatiile energetice ale avioanelor Avioanele moderne si tehnica aerospațială utilizează pe scară largă dispozitive...