
Extras din proiect
1. Consideraţii generale
Mecanismele cu roţi dinţate se împart în mecanisme elementare şi mecanisme complexe. Mecanismele complexe se deosebesc de cele elementare prin faptul că au mai mult de două roţi dinţate. Ele se împart , la rândul lor, în două categorii: mecanisme complexe formate din roţi dinţate cu axe fixe şi mecanisme planetare.
Mecanismele complexe cu axe fixe se obţin prin legarea, în diferite moduri, a mecanismelor elementare. În aplicaţiile tehnice interesează, în primul rând, mecanismele complexe care se obţin prin legarea în serie a mecanismelor elementare, numite şi trenuri de roţi dinţate. Analiza cinematică a acestor mecanisme se reduce la calculul raportului de transmitere total, definit ca raportul dintre viteza unghiulară a elementului conducător şi elementul condus. În cazul în care elementul conducător şi elementul condus au axele paralele, vitezele unghiulare sunt compatibile ca sens şi se pot exprima scalari de semn. În acelaşi fel se poate exprima, atunci, şi raportul de transmitere: semul (+) arătând că cele două elemente se rotesc în acelaşi sens, iar semnul (-) faptul că cele două elemente se rotesc în sensuri diferite.
Raportul de transmitere al unui mecanism complex, se calculează ca produsul rapoartelor de transmitere al mecanismelor elementare componente, considerate scalari.
Mecanismele cu roţi dinţate care conţin cel puţin o roată dinţată cu axă mobilă se mai numesc şi mecanisme epicicloidale.
Din categoria acestor mecanisme fac parte:
- mecanismele diferenţiale (Fig.2.1)
- mecanismele planetare.
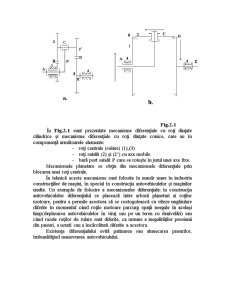
Fig.2.1
În Fig.2.1 sunt prezentate mecanisme diferenţiale cu roţi dinţate cilindrice şi mecanisme diferenţiale cu roţi dinţate conice, care au în componenţă următoarele elemente:
- roţi centrale (solare) (1),(3)
- roţi satelit (2) şi (2’) cu axe mobile
- bară port satelit P care se roteşte în jurul unei axe fixe.
Mecanismele planetare se obţin din mecanismele diferenţiale prin blocarea unei roţi centrale.
În tehnică aceste mecanisme sunt folosite în număr mare în industria construcţiilor de maşini, în special în construcţia autovehiculelor şi maşinilor unelte. Un exemplu de folosire a mecanismelor diferenţiale: în construcţia autovehiculelor diferenţialul se plasează între arborii planetari ai roţilor motoare, pentru a permite acestora să se rostogolească cu viteze unghiulare diferite în momentul când roţile motoare parcurg spaţii neegale în acelaşi timp(deplasarea autovehiculelor în viraj sau pe un teren cu denivelări) sau când razele roţilor de rulare sunt diferite, ca urmare a inegalităţilor presiunii din pneuri, a uzurii sau a încărcăturii diferite a acestora.
Existenţa diferenţialului evită patinarea sau alunecarea pneurilor, îmbunătăţind manevrarea autovehiculului.
2.Analiza unui mecanism cu roţi dinţate
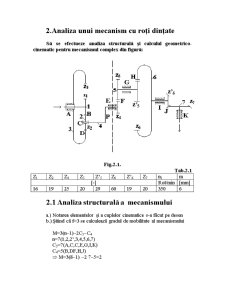
Să se efectueze analiza structurală şi calculul geometrico-cinematic pentru mecanismul complex din figură:
Fig.2.1.
Tab.2.1
Z1 Z2 Z4 Z5 Z’5 Z6 Z’6 Z7 n1 m
[-] Rot/min [mm]
16 19 25 20 29 60 19 20 350 6
2.1 Analiza structurală a mecanismului
a.) Notarea elementelor şi a cuplelor cinematice s-a făcut pe desen
b.) Ştiind că f=3 se calculează gradul de mobilitate al mecanismului
M=3(n1)2C5C4
n=7(1,2,2’,3,4,5,6,7)
C5=7(A,C,C,E,G,I,K)
C4=5(B,DF,H,J)
Preview document













Conținut arhivă zip
- Mecanism cu Roti Dintate.doc
Alții au mai descărcat și

Sa se proiecteze procesul tehnologic si stanta sau matrita pentru obtinerea piesei din figura 1. Materialul utilizat este TDA3 ( tabla decapata...
Te-ar putea interesa și

Partea I Cap I Etajarea schimbatorului de viteze 1.1. Determinarea si definitivarea raportului de transmitere a transmisiei principale...

Etajarea schimbătorului de viteze Predeterminarea caracteristicii de turație la sarcină totală a motorului, din condiția de viteză maximă la...

ARGUMENT Lucrarea cu tema intitulata Transmisii mecanice utilizata in cadrul sistemelor de transmisii mecanice prezinta notiuni referitoare la...

ARGUMENT Tehnologia de asamblare a mecanismelor de transmitere a miscarii. Transmiterea miscarii si energiei mecanice de la un organ de masina la...

1. Tema de proiectare Sa se proiecteze principalele dimensiuni ale mecanismului complex din figura. Se dau urmatoarele date initiale: - É1=100...

Se intocmeste desenul de ansamblu la scara al puntii cu suspensia din fata care va cuprinde: vederea din fata, vederea de sus, sectiuni prin...

ÎNTRODUCERE Elaborarea acestui proiect contribuie la consolidarea materiei teoretice a bazelor proiectării maşinilor, conceperea mai profundă a...

Tema proiectului Sa se proiecteze cutia de viteze pentru masina unealta de gaurit, cu urmatoarele caracteristici principale: - numarul de turatii...