
Cuprins
- 1. Tipul, denumirea si simbolizarea masinii
- 2. Vederea masinii
- 3. Reprezentarea si descrierea structurii constructive si cinematice a masinii
- 4. Reprezentarea schemei cuplelor cinematice
- 5. Principalele caracteristici tehnice si functionale
- 6. Date privind actionarile lanturilor cinematice
- 7. Elemente ale sistemului de comanda
- 8. Accesorii ale masinii
- 9. Sisteme complexe
- 10. Posibilitati de prelucrare
Extras din proiect
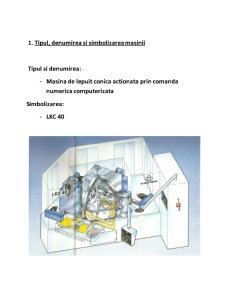
1. Tipul, denumirea si simbolizarea masinii
Tipul si denumirea:
- Masina de lepuit conica actionata prin comanda numerica computerizata
Simbolizarea:
- LKC 40
3. Reprezentarea si descrierea structurii constructive si cinematice a masinii
Bt – batiu SL – sanie verticala Rp – roata pinion
P – pompa Rr – roata rulment St – sanie transversala
Rz – rezervor Sv – sanie verticala
Schema cinematic a masinii de lepuit conica LKC 40
4. Reprezentarea schemelor cuplelor cinematice
Cuple de translatie:
- T (cupla de translatie pe axa X)
- D (cupla de translatie pe axa Y)
- V (cupla de translatie pe axa Z)
Cuple de rotatie:
- A (cupla de rotatie pe axa X)
- B (cupla de rotatie pe axa Y)
5. Principalele caracteristici tehnice si functionale
Date tehnice principale
Diametrul pentru cea mai mare roata u=10 mm 420
Diametrul pentru cea mai mare roata u=1 mm 420
Cel mai mic diametru de pinion mm 30
Compensatia mm ±60
Distanta de la pinionul ax la placa mm 320(max)
mm 120(min)
Distanta de la ax la axa pinionului mm 320(max)
mm 120(min)
Localizarea alezajul axului pinionului 100 metric con
Localizarea alezajul axului placii 60 metric con
Unghiul arborelui 90°
Viteza axului pinion min-1 Continuu de pana la 2500
Ulei si resurse ale masinii
Ulei hidraulic l 100
Masa kg 66
Date performanta
Unitate de putere(pt axa A si B) kW 6,5 fiecare
Tensiunea de intrare/ frecventa Toate tensiunile de alimentare la 50 si 60 Hz
Consum total kVA 57
Unitati de greutate si masura
Cerinte de spatiu (L x l x h) mm 4415 x 2500 x 2170
Greutatea neta cu tot cu accesorii kg Cca.5000
Greutatea bruta in ambalaj de marime normala kg 5800
6. Date privind actionarile lanturilor cinematice
Lanţul cinematic principal, asigură realizarea mişcării I. Viteza de aşchiere se reglează cu ajutorul roţilor de schimb Av, Bv. Capul portcuţite materializează un dinte al roţii plane imaginare, care pe maşină este materializată de platoul Pl . Pentru asigurarea rulării necesare realizării flancului dintelui în evolventă , cele două mişcări II şi III ale platoului şi respectiv a roţii de prelucrat sunt interdependente , fiind legate prin lanţul cinematic de rulare . Acest lanţ cuprinde piesa P , lira de divizare , 11 , 10 , 5 , 4 , z1 , Rc ( roata compusă ) , z4 , 9 , lira de rulare AR/BR angrenajul melcat K1/N1 , platoul . Lanţul cinematic de avans cuprinde melcul 1 , 2 , C2 (cu lira de avans Aa/Ba ) , 3 , 4 , 5 , 6 ,. 7 , 8 , şi camele K1 , K2. Cama K1 comandă mişcarea de apropiere IV , necesară realizării înălţimii dintelui roţii de prelucrat , iar K2 are rolul de a comanda trecerea de la faza activă a ciclului de prelucrare la cea inactivă când se produce divizarea . Cama K2 se roteşte cu unghiul în faza de lucru . Din observaţia că în timpul unui ciclu de prelucrare cama C1 face o rotaţie completă pentru care piesa se va roti cu zd/zp , unde zd reprezintă numărul de dinţi pentru care se efectuează divizarea , iar zp numărul de dinţi ai piesei şi scriindu-se ecuaţia de bilanţ cinematic pentru lanţul cinematic ce leagă rotaţia camei K2 şi cea a piesei, rezultă:
Calculul liniei de rulare se face scriind ecuaţia de bilanţ cinematic a lanţului de rulare .
Condiţia cinematică ce leagă cele două mişcări este :
zrp– numărul de dinţi ai roţii plane
Lira de avans se calculează din condiţia de a realiza un anumit timp pentru ciclul de lucru tl. Cunoscând ca în acest timp motorul va executa nM*tl rotaţii corespund unei rotaţii active a camei K2.
7.Elemente ale sistemului de comanda
Masina de lepuit conica LKC 40 presupune o suprapunere de dinti cu si fara offset, miscarea si pozitionarea pe axa offset a ghidurilor de rulment cu role pe bile este posibila cu ajutorul motoarelor servo controlate prin CNC.
Preview document












Conținut arhivă zip
- Proiect Masini Unelte - LKC 40-CNC
- coperta.docx
- masini unelte vedere.pdf
- Proiect Masini Unelte - LKC 40-CNC.docx
Alții au mai descărcat și

A1.Proiectarea procesului tehnologic de prelucrare. Aceasta parte a proiectului are ca scop final stabilirea, pe baza unor considerente tehnice si...

Capitolul 1. Studiu bibliografic privind maşini – unelte similare celei studiate 1.1 Tipuri de maşini – unelte similare Centrele de prelucrare...

1.Construcţia maşinilor-unelte agregate Maşinile-unelte agregate pot fi definite ca maşini-unelte formate din unul sau mai multe posturi de lucru...

Proiectul la organe de mașini are scopul proiectării unui sistem de transmisii mecanice cu reductor de turație într-o treaptă cu angrenaj cilindric...

Blocul motor si chiulasa Blocul de cilindri preia eforturile de explozie si fortele de inertie ale mecanismului biela manivela. Conditia esentiala...

Proiectarea procesului tehnologic de prelucrare mecanică arbore 1. Alegerea semifabricatului Cerinţele impuse unui tehnolog sunt strâns legate de...

A. MEMORIUL TEHNIC 1. Definirea şi domeniul de utilizare al mecanismului Mecanismele de ridicat (cricurile) au în componenţa lor cuple elicoidale...

SPECIFICATIILE MASINII Curse de lucru MVP-13 Cursa axei X 1300 mm Cursa axei Y 700 mm Cursa axei Z 650 mm Distanta de la sfarsitul axului pana...