
Extras din curs
Ce este mecatronica?
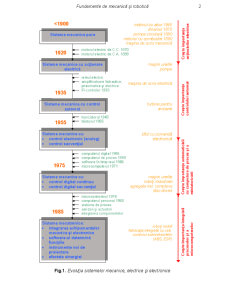
În multe domenii ale tehnicii poate să fie observată integrarea dintre sistemele mecanice şi electronică, integrare care s-a accentuat în special după anul 1980. Aceste sisteme s-au transformat din sisteme electromecanice, formate din componente mecanice şi electrice distincte, în sisteme mecano-electronice integrate echipate cu senzori, actuatori, microelectronică digitală.
Aceste sisteme integrate poartă numele de sisteme mecatronice. În diagrama din figura1 este prezentată sintetic evoluţia sistemelor
Mecatronica reprezintă o treaptă “naturală“ în procesul evoluţiei proiectării inginereşti contemporane.
Dezvoltarea computerelor, apoi a microcomputerelor şi a computerelor incorporate, asociată cu tehnologia informaţiei şi a software-ului, au făcut ca în ultima parte a secolului XX mecatronica să devină un domeniu deosebit de important, chiar imperativ.
Secolul XXI se aşteaptă să fie unul în care se vor dezvolta sistemele integrate bio-electronico-mecanice, computerele cuantice, sistemele pico şi nano, precum şi alte sisteme neprevăzute, ceea ce face ca viitorul mecatronicii să aibă un potenţial deosebit.
Definiţii
Cuvântul “mecatronică” a fost folosit prima dată de către un inginer japonez, Tetsuro Mori, în 1969, care a făcut şi prima încercare de definire a acesteia:
“Cuvântul mecatronică (en. mechatronics) este compus din “meca”, de la mecanism şi din “tronică”, de la electronică. Cu alte cuvinte, tehnologiile şi produsele evoluate vor încorpora în mecanismele lor din ce în ce mai multă electronică, în mod intim şi organic, fiind imposibil să se stabilească unde se termină una şi unde începe cealaltă.”
Definiţii ulterioare mai importante:
Harashima, Tomizuka, şi Fukada [1996]:
“Mecatronica este integrarea sinergică1 a ingineriei mecanice cu electronica şi controlul inteligent al computerului în scopul proiectării şi fabricării produselor şi proceselor industriale.“
Auslander şi Kempf [1996]:
“Mecatronica este aplicaţia de luare a unor decizii complexe în timpul funcţionării sistemelor fizice.“
Shetty şi Kolk [1997]:
“Mecatronica este o metodologie utilizată pentru proiectarea optimală a produselor electromecanice.“
1 Asociaţie a mai multor organe sau ţesuturi pentru îndeplinirea aceleiaşi funcţiuni.(DEX)
Bolton [1999]:
“Mecatronica nu este doar o îmbinare a sistemelor electrice cu cele mecanice, fiind mai mult decât un sistem de control; ci este o integrare completă a acestora.“
DEX [1998]:
“Disciplină tehnică aflată la interferenţa dintre electronică, mecanică şi informatică.“
Wikipedia [2005]:
“Mecatronica este combinaţia sinergică dintre ingineria mecanică, ingineria electronică şi ingineria programării. Scopul acestui câmp ingineresc interdisciplinar este studiul din perspectivă inginerească a sistemelor automate şi serveşte controlului sistemelor hibrid avansate.“
Deşi aceste definiţii şi afirmaţii referitoare la mecatronică sunt corecte din punct de vedere informativ, totuşi fiecare în parte nu reuşeşte să definească în totalitatea noţiunea de mecatronică.
În ciuda încercărilor continue de definire clară a mecatronicii, a clasificării produselor mecatronice şi a dezvoltării unei curricule standard referitoare la aceasta, o concluzie consensuală nu a fost încă formulată. Această lipsă de consens reprezintă un simptom benefic, deoarece se poate aprecia că acest domeniu ingineresc se dezvoltă continuu.
Chiar şi fără o descriere definitivă a mecatronicii, inginerii pot înţelege din definiţiile prezentate mai sus şi din experienţele personale esenţa filozofiei mecatronicii.
Pentru mulţi ingineri angrenaţi în proiectarea de vârf mecatronica nu reprezintă nimic nou. Foarte multe din produsele tehnice realizate în ultimii 25 de ani reunesc şi integrează laolaltă sisteme mecanice, electrice şi informatice care au fost proiectate şi fabricate de ingineri care nu au fost pregătiţi din punct de vedere formal în domeniul mecatronicii.
Este evident că
Preview document














































































Conținut arhivă zip
- Fundamente de Mecanica si Robotica.pdf
Alții au mai descărcat și

INTRODUCERE Exploatarea zăcămintelor de petrol din ţara noastră se face prin mai multe sisteme şi anume: erupţie naturală, erupţie artificială,...

PARTEA I.PROIECTAREA TEHNOLOGIEI DE FABRICAŢIE 1. Analiza funcțional - constructivă a piesei 1.1 Codificarea și clasificarea suprafețelor piesei...

CAPITOLUL 1 Prezentarea generală a roboţilor industriali 1.1 Descrierea roboţilor industriali Actualmente, mediile industriale trebuie să...

Capitolul 1 TENDINŢE ŞI DEZVOLTĂRI ÎN CONDUCEREA AUTOMATĂ ŞI ADAPTIVĂ A MAŞINILOR UNELTE În timp s-au conturat mai multe direcţii importante în...

CAPITOLUL I. Analiza şi completarea datelor iniţiale (de bază) provind proiectarea tehnologică a aparatului şi subansamblului precizate în tema...

Sa se proiecteze schema de actionare hidraulica a unui robot industrial cu 5 grade de libertate ,avand capaciatatea de ridicare de 80 kg. Se va...

1 Configuratia Sistemului 1 2 31 32 4 4 7 6 1 Controler 2 Sitem de pregatire a aerului 3 Supapa de siguranta (31,32) 4 Distribuitor...

Robotul este definit ca un mecanism automat care se poate substitui omului pentru a efectua unele operaţii, fiind capabil să-şi modifice singur...
Te-ar putea interesa și

1. Introducere Denumirea ROBOT a fost introdusă de către scriitorul ceh Karl Capek în lucrarea sa ,,Roboţii universali ai lui Rossum”,(1921),...

NOŢIUNI DE AUTOMATIZAREA, CIBERNETIZAREA ŞI ROBOTIZAREA PROCESELOR TEHNOLOGICE CUPRINS 1. Automatizarea proceselor tehnologice 2....

2. 2. Inovare Prima definiţie a inovării tehnico-economice a fost dată de economistul englez Schumpeter în anul 1941, care afirma că inovarea...

1.1. DE LA INTELIGENTA NATURALA LA INTELIGENTA ARTIFICIALA Inteligenta artificiala este un domeniu care retine din ce in ce mai mult atentia...

2. CREATIVITATE SI INOVARE 2.1. Creativitate 2.1.1. Notiuni generale de caracterizarea creativitatii Un sistem economic nu poate actiona...

ABSTRACT Imbătranirea populatiei genereaza dezvoltarea unei soluţii neasteptate la intersecţia a doua domenii revoluţionare: tehnologiile...

TEMA I INTRODUCERE. NOŢIUNI GENERALE I.1. Fabricaţia I.2. Tehnologia. Definiţie, istoric I.3. Sistem tehnologic I.4. Ingineria convergentă...