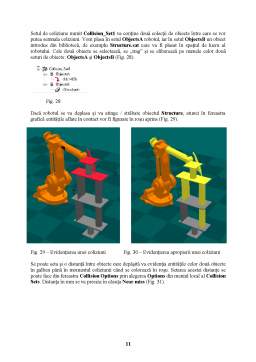
Extras din laborator
Robotul industrial IRB 1400
1. Caracteristici generale
Robotul IRB 1400 este un robot industrial produs de firma ABB Robotics din Suedia. Prin caracteristicile sale poate fi utilizat, în funcţie de efectorul cu care este dotat, în diferite operaţii industriale, cum ar fi: manipulare (deservirea de maşini unelte, prese, etc.), sudură cu arc, lipire, tăiere, debavurare, asamblare. Datorită flexibilitaţii, obţinută atât prin structura mecanică, cât şi prin sistemul de comandă ce permite diferite modalităţi de programare şi de comunicare/sincronizare cu alte echipamente industriale şi cu utilizatorul, robotul IRB 1400 poate fi utilizat şi în sistemele de tip CIM (Computer Integrated Manufacturing).
Lanţul cinematic al robotului este prezentat în fig. 1, pe care sunt notate şi articulaţiile. Se observă că este vorba despre un robot neredondant (6 grade de mobilitate), la care toate articulaţiile sunt de rotaţie, acţionarea fiind electrică, folosindu-se motoare de curent alternativ. Din felul în care sunt plasate axele articulaţiilor rezultă că este vorba despre un robot rezolvabil.
Fig. 1
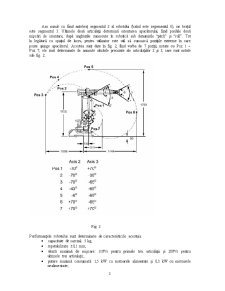
Tot pe fig. 1 este schiţat spaţiul de lucru al robotului, putându-se observa distanţa maximă până la care poate ajunge robotul, care este de 1,444 m, dar care poate fi atinsă numai la o anumită înălţime faţă de planul bazei. Un calcul exact al spaţiului de lucru se poate face pe baza modelului geometric, ştiind şi deplasările maxime pentru articulaţiile robotului. Acestea sunt date în tabelul următor:
Articulaţia Domeniul maxim de deplasare
Articulaţia 1 (rotirea bazei) +170 -170
Articulaţia 2 (înclinare antebraţ) +70 -70
Articulaţia 3 (înclinare braţ) +70 -65
Articulaţia 4 (rotire braţ) +150 -150
Articulaţia 5 (înclinare apucător – “pitch”) +115 -115
Articulaţia 6 (rotire apucător – “roll”) +300 -300
Am numit ca fiind antebraţ segmentul 2 al robotului (batiul este segementul 0), iar braţul este segmentul 3. Ultimele două articulaţii determină orientarea apucătorului, fiind posibile două mişcări de orientare, după unghiurile cunoscute în robotică sub denumirile “pitch” şi “roll”. Tot în legătură cu spaţiul de lucru, pentru utilizator este util să cunoască poziţiile extreme în care poate ajunge apucătorul. Acestea sunt date în fig. 2, fiind vorba de 7 poziţii, notate cu Poz 1 Poz 7; ele sunt determinate de anumite situările precizate ale articulaţiilor 2 şi 3, care sunt notate sub fig. 2.
Fig. 2
Performanţele robotului sunt determinate de caracteristicile acestuia:
- capacitate de sarcină: 5 kg;
- repetabilitate 0,1 mm;
- viteză maximă de mişcare: 110/s pentru primele trei articulaţii şi 280/s pentru ultimele trei articulaţii;
- putere maximă consumată: 1,5 kW cu motoarele alimentate şi 0,3 kW cu motoarele nealimentate;
- greutate: 225 kg pentru robot şi 300 kg pentru sistemul de comandă (acesta din urmă este inclus într-un dulap separat de robot);
- dimensiuni: pentru batiului robotului: 620 x 450 mm, pentru sistemul de comandă 1700 x 915 x 530 mm;
- temperatura de operare: 5 45C pentru robot, 5 40C pentru sistemul de comandă;
- nivelul de zgomat maxim 70 dB;
- unitatea de programare: portabilă (“teach pendant”), cu tastatură, joystick şi display (16 linii x 40 caractere).
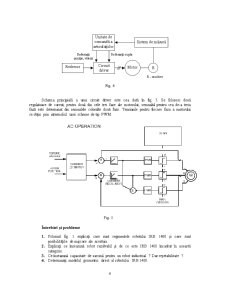
2. Sistemul de comandă a robotului
Sistemul de comandă al robotului este organizat în conformitate cu fig. 3. Acesta constă din 3 unităţi distincte aflate pe două plăci de circuit imprimat. O unitate este calculatorul central care are rolul de a coordona atât activitatea robotului cât şi cea a celorlalte echipamente care cooperează cu robotul şi care sunt comandate prin porturile de intrare/ieşire. Pe nivelul ierarhic inferior se găsesc unitatea de comandă a axelor robotului şi unitatea de comunicaţie. Prima asigură comanda articulaţiilor prin intermediul circuitelor drivere şi culegerea informaţiilor senzoriale de la robot prin intermediul sistemului de măsură (acesta transmite informaţiile la unitatea de comandă a articulaţiilor printr-o legătură serială). Unitatea de comunicaţie este cea care asigură transferul informaţional cu utilazatorul prin intermediul unităţii mobile de învăţare (“teach pendant”), cu alte echipamente prin intermediul porturilor de intrare/ieşire şi cu memoria externă (unitate de dischete).
Preview document














































































































Conținut arhivă zip
- Robotica
- LAB02_Prezentare IRB1400.doc
- LAB03_Operare IRB1400-2400.doc
- LAB04_Limbajul RAPID.doc
- LAB05_Structura RAPID.doc
- LAB06_Modelare cinematica.doc
- LAB07_Robot Studio 1.doc
- LAB08_Robot Studio 2.doc
- LAB09_Sisteme Coordonate.doc
- LAB10_Zone.doc
- LAB11_Parametri ai miscarii.doc
Alții au mai descărcat și

Brat Robot Industrial Braţul robot industrial investigat în acest studiu de caz este descris de un model neliniar flexibil în conformitate cu...

CONTROLLER PROGRAMABIL LOGIC (PLC) Ingineria controlată a evoluat de-a lungul timpului. Cândva, în trecut, oamenii erau principala metodă pentru a...

Manipulatorul este sistemul mecanic automat a carui comanda se bazeaza pe sisteme rigide care presupun o interventie in structura fizica a...



Un controler logic programabil sau automat programabil, este un calculator industrial care îndeplinește funcții de control discrete sau continue...


De-a lungul jumatatii secolului 20, avansarea in tehnologia automatizarii si pneumatica au progresat mult sau mai putin in paralel cu realizarile...
Te-ar putea interesa și

CAPITOLUL 1 Modelare si strategii de conducere a manipulatoarelor robotice 1.1. Introducere în problematica robotilor industriali Notiunea de...

Memoriu de prezentare Activitatea umană s-a orientat întotdeauna spre realizarea unei vieţi mai bune, spre eliberarea parţială sau totală de...

1. Introducere Proiectul are ca scop controlul unui brat robotic care urmareste miscarea unui brat real. Pentru captarea pozitiei bratului...

1. Introducere Denumirea ROBOT a fost introdusă de către scriitorul ceh Karl Capek în lucrarea sa ,,Roboţii universali ai lui Rossum”,(1921),...

1.Introducere Notiunea de robot dateaza de peste 4 mii de ani. Omul si-a imaginat dispozitive mecanizate inteligente care sa preia o parte...

CAPITOLUL 1 INTRODUCERE 1.1. GENERALITATI Robotica reprezintă un domeniu de ştiinţă multidisciplinar, care cuprinde elemente de Fizică,...

Introducere SUA şi Uniunea Europeană se confruntă cu un mare deficit de forţă de muncă în agricultură unde ponderea o are munca la negru şi...

Capitolul 1 1.1 Prezentare generala a tipului de aplicatie de la licenta Paletizarea reprezinta operatia de dispunere voluminca ordonata, in plan...