Extras din laborator
PERFORMANŢELE SISTEMELOR DE REGLARE AUTOMATĂ LINIARE
1. OBIECTIVELE LUCRĂRII
Se determină prin încercări, pe un model simulat, performanţele obţinute de un sistem de reglare automată cu algoritm de reglare liniar în diferite variante de acordare a regulatoarelor de tip P, PI, PD şi PID pentru procese lente.
2. PREZENTARE LUCRARE
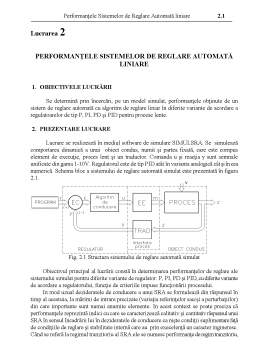
Lucrare se realizează în mediul software de simulare SIMULSRA. Se simulează comportarea dinamică a unui obiect condus, numit şi partea fixată, care este compus element de execuţie, proces lent şi un traductor. Comanda u şi reacţia y sunt semnale unificate din gama 1-10V. Regulatorul este de tip PID atât în varianta analogică cât şi în cea numerică. Schema bloc a sistemului de reglare automată simulat este prezentată în figura 2.1.
Fig. 2.1 Structura sistemului de reglare automată simulat
Obiectivul principal al lucrării constă în determinarea performanţelor de reglare ale sistemului simulat pentru diferite variante de regulator: P, PI, PD şi PID, cu diferite variante de acordare a regulatorului, funcţie de criteriile impuse funcţionării procesului.
In mod uzual dezideratele de conducere a unui SRA se formulează din răspunsul în timp al acestuia, la mărimi de intrare precizate (variaţia referinţelor sau/şi a perturbaţiilor) din care importante sunt numai anumite elemente. In acest context se poate preciza că performanţele reprezintă indici cu care se caracterizează calitativ şi cantitativ răspunsul unui SRA în sensul încadrării lui în dezideratele de conducere ca nişte condiţii suplimentare faţă de condiţiile de reglare şi stabilitate internă care au prin execelenţă un caracter ingineresc. Când se referă la regimul tranzitoriu al SRA ele se numesc performanţe de regim tranzitoriu, respectiv performanţe de regim staţionar când se referă la comportarea staţionară a sistemului automat. De asemenea, când se definesc pentru o anumită valoare a timpului performanţele se numesc locale sau globale.
Pentru SRA liniare cele mai utilizate performanţele locale de regim tranzitoriu, care se definesc pentru funcţia indicială obţinută la un semnal treaptă aplicat la referinţă, sunt:
1. Suprareglajul , definit ca raportul (σ1/yst )(x 100[%] ) ; care de regulă trebuie să nu depăşească valoarea de 20% pentru a nu se afecta stabilitatea sau chiar integritatea obiectului reglat.
2. Timpul tranzitoriu tt , care reprezintă valoarea timpului n care răspunsul intră în domeniul [yst – kstyst , yst + kstyst ] şi nu mai iese, unde kst = 3[%] sau 5[%]. Acest mod de definire asigură compararea răspunsurilor SRA din punct de vedere al duratei regimului tranzitoriu, deoarece teoretic stabilizarea se realizează la t .
3. Timpul de creştere tc, este definit ca raportul dintre yst şi panta în punctul de inflexiune, sau ca timpul în care răspunsul creşte de la 5% la 95% din yst .
4. Gradul de amortizare , este definit prin raportul 1/ 2 , unde 1 şi 2, reprezintă prima, respectiv a doua trecere prin maximul local al răspunsului indicial.
5. Eroarea staţionară st , care este definită ca limită a erorii când t .
Performaţele globale permit caracterizarea răspunsului pe o perioadă finită sau infinită de timp. Cel mai utilizat este criteriu integral I2 de abatere patratică (denumit şi ISE) de forma :
(2.1)
care este utilizabil şi în cazul răspunsurilor periodice amortizate.
Pentru ca SRA să aibă performanţe optime de reglare se realizează acordarea optimă a regulatorului, în cazul lucrării, de tip PID, în conformitate cu criterii de optim, ca de exemplu a celor de tip integral, precum şi de alte criterii de factură inginerească impuse de specificul procesului reglat. In majoritatea cazurilor pentru partea fixată se utilizează un model, obţinut prin identificare, de forma :
(2.2)
Algoritmul de reglare PID continuu are forma ideală:
(2.3)
In practică se utilizează mult mai des varianta serie a algoritmului, în care pentru a se evita şocurile care pot apărea în multe aplicaţii, acţiunea derivativă se aplică direct reacţiei y(t) a cărui sgomot de măsurare este filtrat cu un element dinamic de ordinul 1. In acest caz funcţia de transfer are forma:
(2.4)
In literatura de specialitate [1,2,4] se dau seturi de valori pentru coeficienţii KR, Ti, Td de acordare a regulatoarelor PID, în funcţie de valorile Kf , Tf şi f ale părţii fixate. Aceste valori asigură în majoritatea cazurilor o pornire sigură la trecerea MANual AUTomat, precum şi performanţe dinamice şi statice satisfăctoare. In continuare, pe parcursul exploatării SRA, pentru creşterea performanţelor reale ale sistemului se fac ajustări fine ale parametrilor de acordare până când se obţin rezultatele dorite. O condiţie importantă pentru ca obiectul reglat să fie controlabil cu regulatoare continue de tip PID este ca f /Tf 0,1 , în cazul când aceasta condiţie nu este îndeplinită trebuie să se apeleze la tehnici de compensare a timpului mort.
Preview document





Conținut arhivă zip
- Performantele Sistemelor de Reglare Automata Liniare.doc
Alții au mai descărcat și

1. Tema de proiectare Tema de proiectare se refera la un preamplificator de audiofrecventa de intrare avand schema bloc prezentata în figura 1....

1.1 Generalitati Prin automatizarea proceselor de productie se urmareste eliminarea interventiei directe a omului în aceste procese, asigurându-se...

Magnetronul.Cuptorul cu microunde. Magnetronul Magnetronul este un tub electronic in care, in urma actiunii comune a campului electric si...

1. Argument Omul, ca fiinţă superioară, a fost preocupat din cele mai vechi timpuri de a cunoaşte şi stăpâni natura, de a dirija fenomene ale...

Funcţia esenţiala a unui amplificator de audiofrecvenţa de putere este preluarea unui semnal audio de ordinul sutelor de milivolţi şi amplificarea...

Clasificarea amplificatoarelor Un amplificator consta in unul sau mai multe etaje de amplificare. Ele se pot clasifica dupa urmatoarele criterii....

I.Generalitati Utilizarea cablajelor (circuitelor) imprimate constituie actualmente solutia constructiva cea mai performanta si mai raspândita de...

Obiectul lucrarii: Analiza raspunsului unui amplificator trece banda,cu circuit derivatie,circuit cuplat slab si respectiv circuit cuplat...
Te-ar putea interesa și

Modulul SISTEME DE AUTOMATIZARE este destinat pregătirii elevilor din domeniul TEHNIC, nivel 3, (clasa a XI-a- liceu tehnologic şi clasa a XII-a...

I. GENERALITĂŢI I.1. Sistemele de acţionare Prin element de acţionare electrică se înţelege un motor electric ce urmăreşte un semnal de comandă...

Introducere Un tren cu levitaţie magnetică, sau Maglev, este un tren care utilizează câmpuri magnetice puternice pentru a-şi asigura sustentaţia...

Introducere Etapa conducerii complexe a proceselor tehnologice a permis conceperea şi realizarea unor mijloace tehnice care asigură conducerea...

ARGUMENT Automatica cuprinde totalitatea metodelor si a mijloacelor tehnice prin care se stabilesc legaturi corespunzatoare intre instalatiile...

În evoluţia sa omenirea a fost preocupată de realizarea unor dispozitive, mijloace tehnice, care să solicite cât mai puţin prezenţa omului pentru o...

Scheme de comanda conventionale. Relee intermediare. 1. Scheme conventionale Schema electrica este o reprezentare grafica simplificata a unui...

Cap. 1. Noţiuni fundamentale şi terminologie 1.1. Conceptele de semnal, sistem şi model Conceptul de semnal Noţiunea de semnal posedă un...