
Extras din licență
CAPITOLUL I
Introducere
1.1.Generalitati
1.1.1. Scurt istoric, definiţii
Unul din cele mai importante aspecte în evoluţia fiinţei umane este folosirea uneltelor care să simplifice munca fizică. În aceasta categorie se înscriu şi roboţii, ei ocupând totuşi o poziţie privilegiată datorită complexităţii lor.
Noţiunea de robot datează de peste 4 mii de ani. Omul şi-a imaginat dispozitive mecanizate inteligente care să preia o parte însemnata din efortul fizic depus. Astfel a construit jucării automate si mecanisme inteligente sau şi-a imaginat roboţii in desene, carti, filme "SF" etc.
Revoluţia informatică a marcat saltul de la societatea industrializată la societatea avansat informatizată generând un val de înnoiri în tehnologie şi în educaţie.Acest lucru a dus şi la apariţia roboţilor
Termenul "robot" a fost folosit in 1920 de cehul Karel Capek într-o piesa numită "Robotul universal al lui Kossum". Ideea era simplă: omul face robotul după care robotul ucide omul. Multe filme au continuat sa arate că roboţii sunt maşinării dăunătoare si distrugătoare.
Termenul de “robotics” (în traducere liberă robotică) se referă la ştiinţa care se ocupă de studiul şi utilizarea roboţilor. Acest termen a fost prima data folosit de scriitorul şi omul de ştiinţă american de origine rusă, Isaac Asimov, într-o scurtă povestioară numită “Runaround”, în anul 1942. Această poveste scurtă a fost apoi inclusă într-o colecţie numită “I, Robot”, care a fost publicată în 1950.
Revoluţia informatică a marcat saltul de la societatea industrializată la societatea avansat informatizată generând un val de înnoiri în tehnologie şi în educaţie permiţând realizarea de roboţi.
Roboţii oferă beneficii substantiale muncitorilor, industriilor si implicit ţărilor. In situatia folosirii în scopuri paşnice, roboţii industriali pot influenţa pozitiv calitatea vieţii oamenilor prin înlocuirea acestora in spaţii periculoase, cu conditii de mediu daunatoare omului, cu conditii necunoscute de exploatare etc.
Domeniile de aplicare a tehnicii roboţilor se lărgesc mereu, ei putând fi utilizaţi în industrie, transporturi şi agricultură, în sfera serviciilor, în cunoasterea oceanului şi a spatiului cosmic, în cercetarea ştiinţifică etc.
1.2. Sudiu privind stadiul robotilor mobili
1.2.1 Roboţi mobili
Robotul mobil este un sistem complex care poate efectua diferite activităţi într-o varietate de situaţii specifice lumii reale. El este o combinaţie de dispozitive echipate cu servomotoare şi senzori (aflate sub controlul unui sistem ierarhic de calcul) ce operează într-un spaţiu real, marcat de o serie de proprietăţi fizice (de exemplu gravitaţia care influenţează mişcarea tuturor roboţilor care funcţionează pe pământ) şi care trebuie să planifice mişcările astfel încât robotul să poată realiza o sarcină în funcţie de starea iniţială a sistemului şi în funcţie de informaţia apriori existentă, legată de mediul de lucru.
Succesul în îndeplinirea acestor sarcini depinde atât de cunoştinţele pe care robotul le are asupra configuraţiei iniţiale a spaţiului de lucru, cât şi de cele obţinute pe parcursul evoluţiei sale.
Problemele specifice ce apar la roboţii mobili ar fi următoarele: evitarea impactului cu obiectele staţionare sau în mişcare, determinarea poziţiei şi orientării robotului pe teren, planificarea unei traiectorii optime de mişcare.
În cazul unui sistem robotic automat distribuit poziţiile spaţiale sunt de o extremă importanţă şi de ele depinde îndeplinirea scopurilor dorite şi funcţionarea întregului sistem. Cu alte cuvinte, robotul trebuie să fie capabil să-şi planifice mişcările, să decidă automat ce mişcări să execute pentru a îndeplini o sarcină, în funcţie de aranjamentul momentan al obiectelor din spaţiul de lucru.
Planificarea mişcărilor nu constă dintr-o problemă unică şi bine determinată, ci dintr-un ansamblu de probleme dintre care unele sunt mai mult sau mai puţin variante ale celorlalte.
Evitare coliziunii cu obstacole fixe sau mobile (de exemplu alţi roboţi mobili) aflate în spaţiul de lucru al robotului se poate face prin mai multe metode:realizarea unei apărători mecanice care prin deformare opreşte robotul, folosireasenzorilor care măsoară distanţa până la obstacolele de pe direcţia dedeplasare, folosirea senzorilor de proximitate, folosirea informaţiilor corelate de la mai multe tipuri de senzori.
Localizarea obiectelor se poate realiza şi prin contact fizic, dar acesta impune restricţii asupra vitezei de mişcare a structurii manipulate. Contactul fizic dintre robot şi obiectele din mediu generează forţe de reacţiune care modifică starea robotului. Vitezele mari de lucru fac ca efectele dinamice ale unui contact fizic cu obstacole sau obiecte manipulate să fie riscante (pot duce la deteriorarea obiectelor sau a robotului).
Navigarea robotului este posibilă şi fără o determinare a poziţiei şi orientării faţă de un sistem de coordonate fix, dar această informaţie este utilă pentru sisteme de comandă a mişcării. Dintre metodele de navigaţie mai des utilizate se pot menţiona: măsurarea numărului de rotaţii făcute de roţile motoare, folosirea de acceleratoare şi giroscoape, geamanduri electromagnetice instalate în teren, semnalizatoare pasive sau semipasive de tip optic sau magnetic.
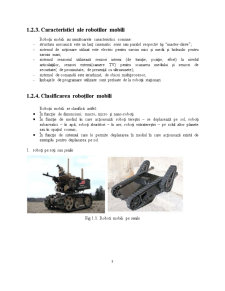
1.2.3. Caracteristici ale robotilor mobili
Roboţii mobili au următoarele caracteristici comune:
- structura mecanică este un lanţ cinematic serie sau paralel respectiv tip “master-slave”;
- sistemul de acţionare utilizat este electric pentru sarcini mici şi medii şi hidraulic pentru sarcini mari;
- sistemul senzorial utilizează senzori interni (de turaţie, poziţie, efort) la nivelul articulaţiilor, senzori externi(camere TV) pentru scanarea mediului şi senzori de securitate( de proximitate, de prezenţă cu ultrasunete);
- sistemul de comandă este ierarhizat, de obicei multiprocesor;
- limbajele de programare utilizate sunt preluate de la roboţii staţionari.
Bibliografie
Mayur Agarwal , Prashant Agrawal , Krishna Nand Gupta , Hitesh Meghani – Line Follower Robot , Robotics Workshop Currents 15th march 2008EEE Department NIT Trichy
Park, Sungyong and Minor, Mark A. "Modeling and Dynamic Control of Compliant Framed Wheeled Modular Mobile Robots", Intemdonal Conhnnu on Robotics L Automation.,New Orloans. LA, 2004.
Ahmadreza Tarakameh, Khoshnam Shojaie - Modeling of a Differential Drive Wheeled Mobile Robot by Newton–Euler Method , Electronic Research Centre, Department of Electrical Engineering, Iran University of Science and Technology Tehran, IRAN
Robo-11 Interactive C robot kit Activity book
Jong-Woo Moon , Chong-kug Park , - Kinematic Correction of a Differential Drive Mobile Robot and a Design for Velocity Trajectory with Acceleration Constraints on Motor Controllers 1999
Muhamad Nor Hafiz B Moktarudin – Application Of LDR Sensor On Line Follower Robot , Faculty Of Electrical Engineering University Teknikal Malaysia Melaka 2008
Adarsh K. , Prashanth S. , Radha malini M.G. – Line Follower Robot Mechatronics Project
Preview document

































































Conținut arhivă zip
- Robot Mobil Autonom.docx
Alții au mai descărcat și

Memoriu de prezentare Activitatea umană s-a orientat întotdeauna spre realizarea unei vieţi mai bune, spre eliberarea parţială sau totală de...

1.Introducere Notiunea de robot dateaza de peste 4 mii de ani. Omul si-a imaginat dispozitive mecanizate inteligente care sa preia o parte...

CAPITOLUL 1 INTRODUCERE 1.1. GENERALITATI Robotica reprezintă un domeniu de ştiinţă multidisciplinar, care cuprinde elemente de Fizică,...

INTRODUCERE Scopul lucrarii Sa se proiecteze un plotter care va avea rolul de a desena cu ajutorul unui marker pe un anumit spatiu de lucru....

Introducere Unul din cele mai importante aspecte în evoluţia fiinţei umane este folosirea uneltelor care să simplifice munca fizică. În aceasta...

Capitolul 1 Introducere Platformele mobile robotice sunt utilizate cel mai des in interiorul fabricilor sau depozitelor pentru transportul de...

1.Introducere in problematica robotilor Cuvântul robot provine din limba ceha (robota) şi înseamna muncitor, sau rob. Provenienta acestui cuvânt...

Subsistemele logistice ale unor sisteme de fabricatie moderne utilizeaza, pentru manipularea si transportul materialelor, pieselor,...
Te-ar putea interesa și
Memoriu de prezentare Activitatea umană s-a orientat întotdeauna spre realizarea unei vieţi mai bune, spre eliberarea parţială sau totală de...

Rezumat Lucrarea de licenţa cu titlul ,,Proiectarea si realizarea unui vehicul autonom cu tracţiune diferenţiala realizată cu motoare pas cu pas’’...
1.Introducere Notiunea de robot dateaza de peste 4 mii de ani. Omul si-a imaginat dispozitive mecanizate inteligente care sa preia o parte...

1 Introducere În această lucrare este prezentat un modul de locomoție pentru roboți autonomi în toate fazele de dezvoltare, de la identificarea...

1 Capitolul I – Generalităţi privind roboţii . 1.1 Ce este un robot? 1.1.1 Definiţie. Particularităţi. Din câte am observat după o documentare...

Introducere Unul din cele mai importante aspecte în evoluţia fiinţei umane este folosirea uneltelor care să simplifice munca fizică. În aceasta...
Introducere Unul din cele mai importante aspecte în evoluţia fiinţei umane este folosirea uneltelor care să simplifice munca fizică. În aceasta...

Introducere Unul din cele mai importante aspecte în evoluţia fiinţei umane este folosirea uneltelor care să simplifice munca fizică. În aceasta...