Extras din proiect
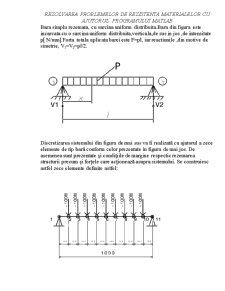
Bara simplu rezemata, cu sarcina uniform distribuita.Bara din figura este incarcata cu o sarcina uniform distribuita,verticala,de sus in jos ,de intensitate p[ N/mm].Forta totala aplicata barei este F=pl, iar reactiunile ,din motive de simetrie, V1=V2=pl/2.
Discretizarea sistemului din figura de mai sus va fi realizată cu ajutorul a zece elemente de tip bară conform celor prezentate în figura de mai jos. De asemenea sunt prezentate şi condiţiile de margine respectic rezemarea structurii precum şi forţele care acţionează asupra sistemului. Se construiesc astfel zece elemente definite astfel:
Sunt prezentate în cele ce urmează fisierele cu datele de intrare necesare
rezolvării problemei.
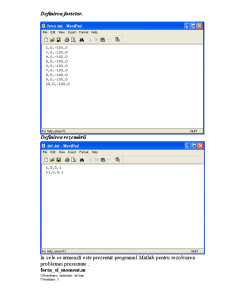
Definirea nodurilor
Definirea elementelor.
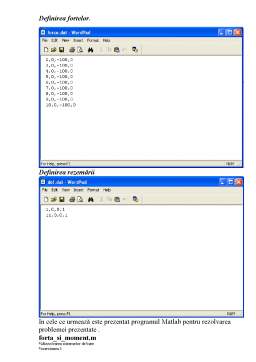
Definirea fortelor.
Definirea rezemării
In cele ce urmează este prezentat programul Matlab pentru rezolvarea problemei prezentate
forta_si_moment.m
%Rezolvarea sistemelor de bare
%versiunea 1
%10.01.2006
%Stefan TABACU
%initializarea sistemului
close all
clear all
%
%Defineste sectiunea
b_sect=5;
h_sect=10;
I_sect=b_sect*h_sect^3/12;
A_sect=b_sect*h_sect;
%Defineste material
E_mat=2.1e5;
%Definirea nodurilor
%incarca datele din fisier
load nodes.dat
%Definirea elementelor
load beams.dat
%definirea fortelor
load force.dat
%definirirea rezemarilor
load dof.dat
%Date despre problema
[n_elems,n1]=size(beams); %Numarul de elemente in problema
[n_noduri,n1]=size(nodes); %Numarul de noduri in problema
%Definirea elementelor - noduri capete, lungime element
%Calculeaza lungimea elementelor;
for ii=1:n_elems
%identifica nodurile fiecarui element
node_1=beams(ii,2); node_2=beams(ii,3);
%identifica coordonatele fiecarui nod
cota_x_node_1=nodes(node_1,2); cota_y_node_1=nodes(node_1,3);
cota_x_node_2=nodes(node_2,2); cota_y_node_2=nodes(node_2,3);
%calculeaza lungimea elementului
lung_elem(ii)=sqrt((cota_x_node_1-cota_x_node_2)^2+(cota_y_node_1-cota_y_node_2)^2);
end
%Modul pentru definirea orientarii elementelor
%Calculeaza cosinul si sinusul
%!!!
%Atentie la alinierea elementelor pentru a putea calcula coret siniul si
%cosinusul. Referinta se considera nodul al cauri numar de ordine este mai
%mare.
for ii=1:n_elems
node_1=beams(ii,2); node_2=beams(ii,3);
cota_x_node_1=nodes(node_1,2); cota_y_node_1=nodes(node_1,3);
cota_x_node_2=nodes(node_2,2); cota_y_node_2=nodes(node_2,3);
alfa(ii)=asin(abs((abs(cota_y_node_2)-abs(cota_y_node_1)))/lung_elem(ii));
addition(ii)=0;
centru_x=cota_x_node_2;centru_y=cota_y_node_2;
if (cota_x_node_1<centru_x) & (cota_y_node_1>centru_y)
addition(ii)=pi/2;
elseif (cota_x_node_1<centru_x) & (cota_y_node_1<centru_y)
addition(ii)= pi;
elseif (cota_x_node_1>centru_x) & (cota_y_node_1<centru_y)
addition(ii)=3*pi/2;
elseif (cota_x_node_1==centru_x) & (cota_y_node_1<centru_y)
addition(ii)=0;
elseif (cota_x_node_1==centru_x) & (cota_y_node_1>centru_y)
addition(ii)=pi;
elseif (cota_y_node_1==centru_y) & (cota_x_node_1>centru_x)
addition(ii)=pi;
end
alfa(ii)=alfa(ii)+addition(ii);
addition_grd(ii)=addition(ii)*180/pi;
alfa_grd(ii)=alfa(ii)*180/pi;
C_(ii)=cos(alfa(ii));S_(ii)=sin(alfa(ii));
end
%alfa(1)=pi/4+pi; alfa(2)=pi/2+pi/2; alfa(3)=0;
%C_(1)=cos(alfa(1));S_(1)=sin(alfa(1));
%C_(2)=cos(alfa(2));S_(2)=sin(alfa(2));
%C_(3)=cos(alfa(3));S_(3)=sin(alfa(3));
%Defineste matricile de rigiditate ale elementelor
for ii=1:n_elems
C_1_1=A_sect*E_mat/lung_elem(ii);
C_1_2=12*E_mat*I_sect/lung_elem(ii)^3;
C_1_3=6*E_mat*I_sect/lung_elem(ii)^2;
C_1_4=4*E_mat*I_sect/lung_elem(ii);
C_1_5=2*E_mat*I_sect/lung_elem(ii);
%matricea de rigiditate in coordonate locale
K_l(:,:,ii)=[C_1_1 0 0 -C_1_1 0 0;
0 C_1_2 C_1_3 0 -C_1_2 C_1_3;
0 C_1_3 C_1_4 0 -C_1_3 C_1_5;
-C_1_1 0 0 C_1_1 0 0;
0 -C_1_2 -C_1_3 0 C_1_2 -C_1_3;
0 C_1_3 C_1_5 0 -C_1_3 C_1_4];
%matricea de transformare
T_l(:,:,ii)=[ C_(ii) S_(ii) 0 0 0 0;
-S_(ii) C_(ii) 0 0 0 0;
0 0 1 0 0 0;
0 0 0 C_(ii) S_(ii) 0;
0 0 0 -S_(ii) C_(ii) 0;
0 0 0 0 0 1];
%matricea de rigiditate in coordonate globale
K_g(:,:)=inv(T_l(:,:,ii))*K_l(:,:,ii)*T_l(:,:,ii);
K_g_ii(:,:,ii)=inv(T_l(:,:,ii))*K_l(:,:,ii)*T_l(:,:,ii);
%K_g(:,:)=K_l(:,:);
%
K_11(:,:,ii)=[K_g(1,1) K_g(1,2) K_g(1,3);
K_g(2,1) K_g(2,2) K_g(2,3);
K_g(3,1) K_g(3,2) K_g(3,3)];
K_12(:,:,ii)=[K_g(1,4) K_g(1,5) K_g(1,6);
K_g(2,4) K_g(2,5) K_g(2,6);
K_g(3,4) K_g(3,5) K_g(3,6)];
K_21(:,:,ii)=[K_g(4,1) K_g(4,2) K_g(4,3);
K_g(5,1) K_g(5,2) K_g(5,3);
K_g(6,1) K_g(6,2) K_g(6,3)];
K_22(:,:,ii)=[K_g(4,4) K_g(4,5) K_g(4,6);
K_g(5,4) K_g(5,5) K_g(5,6);
K_g(6,4) K_g(6,5) K_g(6,6)];
Preview document











Conținut arhivă zip
- Analiza Numerica a Sistemelor Mecanice.DOC
Alții au mai descărcat și

CAP. 1 STUDIUL DE NIVEL AL ACESTUI MOTOR Studiul parametrilor principali ai autovehicolului 4l: Tabelul 1.1 Marca şi Model Nr. cilindri Amplasare...

Si adoptam diferite alte dimensiuni: D = 84 (alezaj) S = 96 (cursa) r = 48 (raza manivelei) Motorul este fabricat de compania Volvo incepand cu...

ARGUMENT Rolul acestui proiect este acela de a elabora concret tehnologia de fabricare a unei roti dintate conice. Pentru realizarea proiectului...

Temă de proiect Proiectarea generală a unui M.A.I. pentru tracțiune rutieră în 4τ, răcit cu lichid, având următoarele caracteristici: -Tip...

MECANISMUL DE GHIDARE • Are rolul de a realiza o legatura corecta a rotilor cu caroseria. • Trebuie sa permita anumite miscari sau sa...

În ultimul secol mașinile și camioanele au fost predominant fabricate dintr-un singur material: oțelul. Nu este greu să iți dai seama și de ce:...

Organizarea procesului de productie si tehnologic pentru reparatia ambreajului 1.1Caracteristica generala Ambreiajul- face parte din transmisia...

Analizator Dozaj Aer-Carburant MEXA-730λ Prezentare produse Original panoul frontal oferă o vizibilitate sporită şi funcţionarea senzor de...
Te-ar putea interesa și

Memoriu justificativ In cadrul fiecarei cercetari desfasurate, indiferent de domeniul la care ne referim, rezultatele obtinute pe cale teoretica...

INTRODUCERE În cadrul transferului de căldură sunt analizate procesele spontane ireversibile în care energia se schimbă între corpuri (sisteme)...

Introducere Creşterea economică, caracteristică civilizaţiei industriale se bazează pe resurse neregenerabile (petrol, cărbuni, gaze naturale). În...


OBIECTIVELE Proiectului Işi propune evidenţierea elementelor de bază ale proiectării subansamblurilor mecanice, utilizate la autovehicule rutiere....

Capitolul I PROGRAMAREA NUMERICĂ A MAŞINILOR-UNELTE 1.1 MAŞINA-UNEALTĂ ŞI PROGRAMUL SĂU Scopul unei maşini-unelte este de a prelucra piese prin...

Cap.I. Dimensiunile principale ale autovehiculelor În figura 1.1. sunt prezentate principalele dimensiuni geometrice ale automobilului, conform...

INTRODUCERE Activitatea inginerească, în general, are ca finalizare realizarea de obiecte tehnice, care se materializează în urma unor procese de...