Extras din proiect
Cap.l Proiectarea SAS
1.l Analiza dinamicii longitudinale nereglate
Pentru analiza raspunsurilor în timp la comenzi treapta unitate si impuls se va liniariza dinamica longitudinala a avionului ... pentru conditiile nominale de zbor:
h = 10.000 m; f/0=150m/s '
Se vor lua în considerare:
-variatia de viteza de-a lungul axei longitudinale (Ox) ;
-viteza ascensionala - ;
-viteza unghiulara de tangaj - ;
unghiul de atitudine longitudinala- .
Dinamica longitudinala se poate scrie ca un sistem liniar:
x = Âx + BS,
în care x este vectorul de stare, A este matricea de stabilitate, B este matricea de comanda, iar ´ este comanda (care se va considera ca fiind bracajul de profundor ´e).
Relatia (1.2) se mai poate scrie:
Pentru conditiile nominale de zbor (1.1), matricele si au urmatoarele valori:
A=valorile matricii de stabilitate
B=Valorile matrici de comad.
Valorile proprii ale matricei de stabilitate se determina cu ajutorul: , rezultand valorile:
Valori proprii A
Ecuatia (1.3) devine:
Matricea iesirilor este:
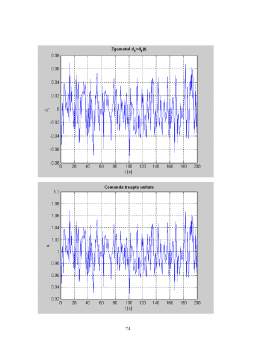
Trasarea raspunsurilor sistemului la comenzi treapta si impuls Dirac se vor face pentru scurta perioada (starile si ), respectiv lunga perioada (starile si ).
sunt moduri rapide, dinamica lor detrmina scurta perioada
sunt moduri lente, dinamica lor determina fugoida (lunga perioada)
Scurta perioada se va decupla de dinamica longitudinala astfel:
unde ,
Programul MATHLAB prezentat mai jos realizeaza trasarea raspunsurilor sistemului la comenzi treapta si impuls Dirac folosind comenzile step si impulse.
%Trasarea raspunsurilor la comenzi treapta si impuls Dirac
clear;clc;
disp('Trasarea raspunsurilor la comenzi treapta si impuls Dirac');disp('');
disp('vectorul de stare:');disp('');
disp('x=[u alfa q theta]''');
A=[-0.42558E-02 -0.11234E+02 -0.61284E-01 -0.98100E+01;-0.47720E-03
-0.12219E+01 0.98274E+00 0.00000E+00 ; 0.71169E-03 -0.91715E+01 -0.99419E+00 0.00000E+00 ; 0.00000E+00 0.00000E+00 0.10000E+01 0.00000E+00]; %matrice de stabilitate
B=[-0.29296E+01;0.72292E-01;0.37688E+01;0]; %matrice de comanda
disp('Matrice de stabilitate:');A
disp('Matrice de comanda:');B
Preview document














































































Conținut arhivă zip
- Proiect CAA 2.doc
Alții au mai descărcat și

Standardele ISO 14000 sunt standarde generale referitoare la sistemele de management de mediu destinate pentru tinerea sub control a impactului...

Elementele pneumatice de excutie (motoarele pneumatice) transforma energia aerului comprimat in lucru mecanic. Motoarele pneumatice pot fi: • cu...

Filtrele sunt circuite electronice care efectueaza funcţii de prelucrarea semnalelor, special destinate pentru a elimina componentele de semnal...

CURS 1 MODELAREA MATEMATICĂ A SISTEMELOR Sistemele mecatronice sunt structuri complexe formate din componente mecanice, electronice şi elemente de...

ASAMBLĂRI PRIN ȘURUBURI. Asamblarea cu șuruburi este una din cele mai vechi metode de asamblare utilizată în construcția de mașini. Aproape că nu...

CONVENȚII INTERNAȚIONALE ÎN DOMENIUL SECURITĂȚII - Convenția de la Chicago din 1944 - Convenția de la Tokyo din 1963 - Convenția de la Haga din...

INTRODUCERE Avionica (AVIation electrONICS - avionics) este termenul prin care, începând din perioada anilor 1930, sunt reunite echipamentele care...

I. ELEMENTE GENERALE 1.1. Instalatiile energetice ale avioanelor Avioanele moderne si tehnica aerospațială utilizează pe scară largă dispozitive...
Te-ar putea interesa și

INTRODUCERE Mondializarea economiei si tranzitia la economia de piata în Europa de Est sunt procese care au determinat proliferarea si...

Valorificarea subproduselor și minimizarea deșeurilor din industria panificației 1. Introducere Industria de panificație este una din...

1 PREZENTAREA ORGANIZAȚIEI Cantina Universității Tehnice „Gheorghe Asachi” din Iași a fost inaugurată pe 9 mai 2011, în urma unui amplu proiect...

1. Situatia actuala si cauze Conform unui studiu realizat in luna decembrie de publicatia Business Magazin1, concordanta dintre pregatirea...

CAPITOLUL I. NOŢIUNII FUNDAMENTALE PRIVIND INTEGRALA DEFINITĂ. 1.1. Conceptul de integrală definită. 1.1.1. Definiţia şi proprietăţi. Fie...

Comunităţile locale rurale din România au fost afectate de evoluţia istoriei din ultimele decenii.Acestora li s-au adăugat anii economiei...

LABORATOR 1 Ce este mecatronica? În multe domenii ale tehnicii poate să fie observată integrarea dintre sistemele mecanice şi electronică,...

1. PROCESUL DE UNIFICARE LEGISLATIVĂ ŞI DE INTEGRARE A PROVINCIILOR UNITE CU ROMÂNIA ÎN STRUCTURILE NOULUI STAT Unirea Basarabiei, Bucovinei şi...