
Extras din proiect
Temă proiect:
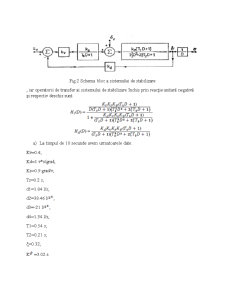
Studiul asistat de calculator al dinamicii de stabilizare unghiulară a rachetei în plan vertical cu giroscop diferenţiar, fară reţea de corecţie, la timpul de 10, respectiv 20 de secunde.
Datele iniţiale:
Kv=0.4
Kd=1 v*s/grad
Ks= 0.9 grad/v
Ts=0.2 s
Cerinţe:
1)Determinarea schemelor bloc ale sistemului;
2) Determinarea funcţiei de transfer în circuit închis şi deschis;
3)Realizarea caracteristicilor de frecventă ale sistemului;
4)Determinarea rezervelor de stabilitate ale sistemului ;
5) Realizarea răspunsului la intrare treaptă, respectiv rampă;
6)Determinarea matricilor A, B, C, D ale sistemului.
Pentru realizarea performanţelor impuse, în navigaţie şi în dirijarea aparatelor de zbor este necesară asigurarea stabilitaţii şi, în acelaşi timp, a manevrabilitaţii lor în prezenţa perturbaţiilor interne şi externe. Cu cât coeficientul de amortizare a oscilaţiilor aparatului de zbor este mai mare, cu atât procesul pilotării sau dirijării se simplifică, creşte precizia şi manevrabilitatea. Creşterea stabilitaţii şi manevrabilitaţii aparatului de zbor ,A, se realizează pe baza principiului fundamental al conducerii automate – principiul acţionării prin discordanţă, eroarea ca semnal de conducere exprimând modificarea poziţiei, vitezei unghiulare sau încărcării aerodinamice. Aşadar, sistemele de stabilizare prezintă reacţii negative dupa poziţia, viteza unghiulară şi după suprasarcina, aceasta exprimând precizia şi manevrabilitatea aparatului de zbor. De asemenea in sistemele de stabilizare se pot introduce retele de corecţie serie, paralelă sau mixtă.
Creşterea performanţelor dinamice ale aparatelor de zbor are la bază, de asemenea, utilizarea sintezei optimal şi adaptive ale sistemelor de stabilizare. În cele ce urmează vor fi abordate în special problemele stabilizării rachetelor.
1.1 STABILIZAREA RACHETELOR ANTIAERIENE, RACHETELOR DE TIP AER-AER SI AER-SOL
La rachetele antiaeriene, rachete de tip aer-aer şi aer-sol sistemele de stabilizare înteplinesc totodată şi funcţia de control al suprasarcinii. Deoarece la majoritatea acestora amortizarea oscilaţiilor este slabă (ξ ), este dificil de controlat suprasarcina. În plus odată cu creşterea vitezei şi altitudinii de zbor dificultatea creşte. În concluzie, sistemele de stabilizare trebuie să corecteze caracteristicile dinamice ale rachetelor. De asemenea, se impune ca acestea să reducă influenţa perturbaţiilor exterioare şi a zgomotelor interne. Pentru aceasta, banda de trecere a semnalelor de comandă şi perturbatoare se alege în conformitatea cu indicatorii tehnici de calitate.
Adesea, cerinţele impuse sistemelor de stabilizarea sunt opuse celor impuse sistemelor de dirijare. Astfel, pentru reducerea influenţei zgomotelor asupra sistemelor de stabilizare, se impune micşorarea influenţei reciproce a canalelor rachetei, ceea ce conduce însă la creşterea erorilor dinamice de dirijare şi, implicit, la reducerea eficacitaţii. De aceea, în procesul proiectării sistemelor de stabilizare trebuie adoptate soluţii de compromis.
Pentru fiecare tip de rachetă trebuie detreminaţi coeficienţii , ca funcţii de timp. Coeficienţii de transfer, , caracterizează atât stabilitatea exprimată prin gradul de stabilitate şi rezervele de stabilitate sau prin indicatorul de oscilaţie, cât şi manevrabilitatea rachetei. Manevrabilitatea aparatului de zbor poate fi exprimată cantitativ pe o scală gradată, care permite alegerea manevrabilitaţii acceptabile. Existenţa zeroului aşa cum rezultă din expresia operatorului de transfer, influentează considerabil procesul tranzitoriu, determinând un suprareglaj apreciabil al vitezei unghiulare la un semnal de comandă de tip treaptă. Aprecierea manevrabilităţii se poate face printr-un indicator care exprimă dependenţa raportului sau a produsului de coeficientul de amortizare ξ. Pentru îmbunătăţirea stabilităţii şi creşterea manevrabilităţii se introduce o reacţie negativă dupa viteza unghiulară ,care determină creşterea coeficientului de amortizare.
Preview document
























Conținut arhivă zip
- Proiect Sisteme de Dirijare a Rachetelor.doc
Alții au mai descărcat și

APARATE DE BORD CAP. I. – GENERALITATI Sunt dispozitive destinate pentru culegerea, convertirea, transmiterea si afisarea informatiilor necesare...

TEMA DE PROIECT NR 10 APARAT DE ZBOR TELEDIRIJAT AER -AER Să se facă analiza sistemului de comandă pentru un aparat de zbor cu următoarele...

Cap 1. Introducere Each year there are a number of aircraft accidents related to weight and balance issues. Such accidents have occurred due to...

Date generale Presiunea este un parametru de stare dintre cei mai importanti care caracterizeaza starea unui fluid. Ea se defineste ca fiind...

Elementele pneumatice de excutie (motoarele pneumatice) transforma energia aerului comprimat in lucru mecanic. Motoarele pneumatice pot fi: • cu...

CURS 1 MODELAREA MATEMATICĂ A SISTEMELOR Sistemele mecatronice sunt structuri complexe formate din componente mecanice, electronice şi elemente de...

OBLIGATIILE ELEVULUI PILOT SI A PILOTULUI SPORTIV A.Pe aerodrom: -Sa aiba asupra sa -brevetul de pilot sportiv; -legitimatia de acces pe...

ASAMBLĂRI PRIN ȘURUBURI. Asamblarea cu șuruburi este una din cele mai vechi metode de asamblare utilizată în construcția de mașini. Aproape că nu...
Te-ar putea interesa și

CAPITOLUL I CADRUL ORGANIZATORIC LA SC AEROSTAR SA 1.1.Istoricul societati comerciale Scopul înfiinţării societăţii a fost asigurarea reparării...

APARIŢIA STATULUI: CONTESTAREA NARAŢIUNII TRADIŢIONALE Înălţarea şi declinul creştinătăţii, depăşirea feluritelor şi variatelor exprimări ale...

Datorita stadiului avansat al tehnicii de lupta, dupa cel de-al doilea razboi mondial au aparut si s-au perfectionat noi tipuri de arme de mare...

Scurt istoric al EW Războiul electronic, într-un context foarte general, trebuie perceput ca o interacţiune continuă între mijloacele şi sistemele...

CAP. 1 CONTRACARAREA ATACUL ELECTRONIC 1.1 NOTIUNI DESPRE ATACUL ELECTRONIC Atacul electronic (EA) este definit ca un ansamblu de masuri care se...

TEMA 3. BAZELE LUPTEI MODERNE DE ARME ÎNTRUNITE ŞEDINŢA 1. Prelegere – 2 ore. Esenţa şi trăsăturile caracteristice ale luptei moderne de arme...

Cap.I. Definiții și particularități ale sistemelor de urmărire I.1. Noțiuni introductive Sistem de urmărire = sistem de control al poziției,...

INTRODUCERE Teza de doctorat conține o introducere și este structurată pe 6 capitole în care am prezentat modelele fenomenelor meteorologice care...