
Extras din laborator
C1. CINEMATICA PUNCTULUI MATERIAL (I)
Punctul M se deplasează după legea dată în tabelul 1 , unde x şi y se dau în cm iar t în secunde.
Să se determine traiectoria punctului, viteza şi acceleraţia pentru momentul t, precum şi raza de curbură a traiectoriei.
Tabelul 1
Nr.crt. Ecuaţiile mişcării t
s
x = x(t) cm y = y(t) cm
1 - 2t2 + 3 - 5t 1/2
2
1
3
1
4
4t + 4
2
5
1
6 3t2 + 2 - 4t 1/2
7
3t2 – t + 1
1
8
1
9
3t + 6
2
10
1
11 - 4t2 + 1 - 3t 1/2
12
1
13
1
14
- 2t - 2
2
15
1
16 3t 4t2 + 1 1/2
17
1
18
1
19 - 5t2 - 4 3t 1
20
2 – 3t – 6t2
1
21
0
22 7t2 - 3 5t 1/4
23
3 – 3t2 + t
1
24
1
25 - 6t - 2t2 - 4 1
26
1
27
1
28 - 4t2 + 1 - 3t 1
29
3t2 + t + 3
1
30
1
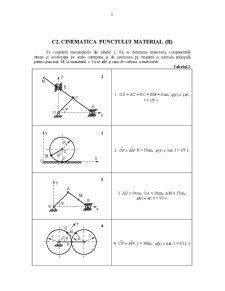
C2. CINEMATICA PUNCTULUI MATERIAL (II)
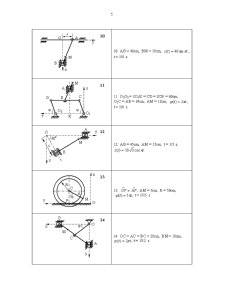
Se consideră mecanismele din tabelul 2. Să se determine traiectoria, componentele vitezei şi acceleraţiei pe axele carteziene şi de asemenea pe tangentă şi normala principală pentru punctual M, la momentul t. Să se afle şi raza de curbură a traiectoriei.
Tabelul 2
1. OC = AC = BC = BM =15cm, , t = 1/6 s.
2. R = 50cm, , t = 1/9 s.
3. AB = 54cm, OA = 30cm, AM = 27cm, , t = 1/2 s.
4. , r = 30cm, , t = 1/12 s
Preview document













Conținut arhivă zip
- Probleme Cinematica.doc
Alții au mai descărcat și

1.1. Scopul lucrării Lucrarea îşi propune cunoaşterea particularităţilor constructive şi funcţionale ale preselor mecanice cu excentric şi al...

3.1. Consideraţii teoretice O masă de lichid care execută o mişcare de rotaţie împreună cu vasul în care se găseşte, datorită forţelor de frecare...

REFERAT NR. 1 LUCRAREA: REDUCEREA ANALITICA SI GRAFICA A UNUI SISTEM DE FORTE COPLANARE 1.1 TEMA LUCRARII Se considera un sistem de forte...

• Introducere relatii Miscarea oscilatorie armonica rectilinie. Definitie: Un punct material executa o miscare oscilatorie armonica rectilinie...

1. Generalităţi Sistemul de rulare al automobilului se compune din roţi şi elementele de legătură ale acestora cu punţile automobilului. Roţile...


Caracterizarea blocului de cilindrii pentru automobilele Dacia. Blocul cilindrilor este din fontă, fiind prelucrat plan pe patru feţe, având rol...

2°.3 CALCULUL TRANSMISIEI PRIN CURELE TRAPEZOIDALE [2] Curelele trapezoidale se utilizeaza în general pentru transmiterea unor puteri P mai mici...
Te-ar putea interesa și

Mecatronica este un concept japonez care datează din anii 1970 și care poate fi definit ca aplicarea electronicii și tehnologiei calculatoarelor cu...

CAPITOLUL 1 STADIUL CERCETARILOR IN DOMENIUL RULMENTILOR RADIALI AXIALI CU BILE DE CONSTRUCTIE CLASICA SI HIBRIDA 1.1. Rulmenti hibrizi cu...

Sinteza Dimensională Sinteza dimensională constă in determinarea parametrilor constructivi ai mecanismului pornind de la condiţiile funcţtionale...

Introducere La întreprinderile de alimentatie publica,un rol important în procesul tehnologic de prelucrare mecanica a produselor alimentare, il...

1. ROBOTI INDUSTRIALI - INTRODUCERE Robotica este un domeniu al ştiinţei şi tehnicii relativ nou, cu o rapidă dezvoltare, legat de realizarea şi...

CARACTERISTICILE ROBOTILOR PUMA 600 Schema cinematica a robotului industrial PUMA 600 este redata în figura de mai jos: Acest robot industrial...

Definirea temei de proiectare 1.Coordonatele articulare pentru două puncte aparţinând spaţiului de lucru al robotului definite în coordonatele lor...

Analiza de poziții pentru structura roboților industriali Analiza de poziție utilizând matricile de transformare Ca mod de utilizare a acestei...